关于PC104与C8051F120的水下机器人环境监测系统设计
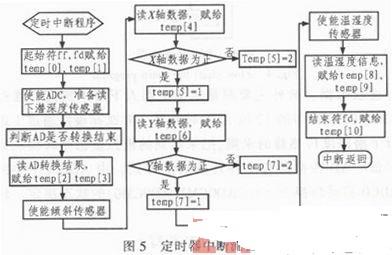
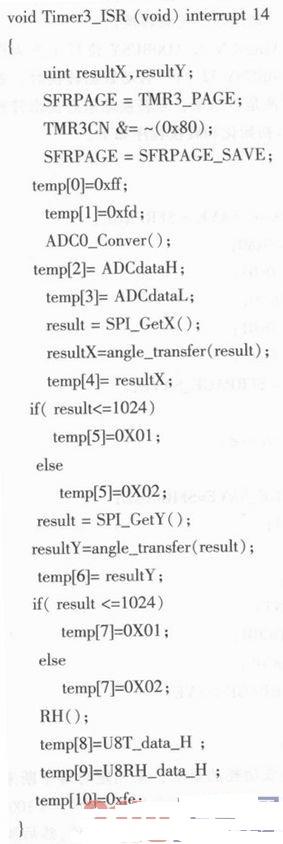
定时器中断程序如下。
3.4串口通信模块
串口通信模块主要是负责和工控机进行通信,当PC104需要传感器数据的时候,单片机就通过串口把数据发给PC104,PC104在把信息发送给岸上的微型计算机,供用户进行显示。图6是串口中断程序流程图。
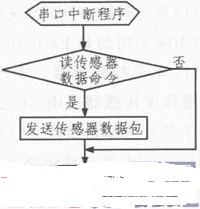
串口中断程序如下。

4视频图像的采集和传输
H264采用"回归基本"的简洁设计,不用众多的选项,获得比MPEG-4好得多的压缩性能;H.264加强了对各种信道的适应能力,采用"网络友好"的结构和语法,有利于对误传和丢包的处理;H.264应用目标范围较宽,可以满足不同速率、不同解析度以及不同传输(存储)场合的需求。
RTP是一种网络传输协议,RTP协议不要求底层网络提供可靠的数据传输服务,它自身也不对报文丢失、重复和次序颠倒等差错进行处理。应用程序可以通过检测RTP报文固定头中的次序号发现传输过程中的差错。RTP具有较好的实时性,对于低带宽实时性要求高的场合很实用。
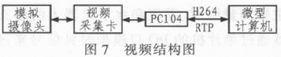
图7是视频结构图。PC104和微型计算机之间采用的是C/S模式。模拟摄像头的信号通过视频采集卡送入到PC104中,PC104通过H264压缩后,然后通过RTP传输给微型计算机,微型计算机接受到视频数据后进行解压显示。
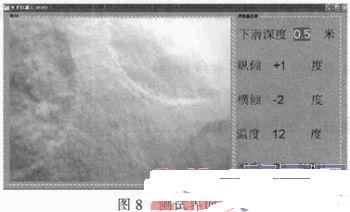
5实验应用
该系统用于水下机器人周围环境的测试。在进行测试时,通过按操作员控制器上面的相应按钮来实现相应的功能。当点击视频采集按钮时,视频图像数据会显示;当点击传感器数据采集按钮时,传感器数据会显示。测试界面如图8所示,图中的视频图像是水下桥墩的墙壁。当发现数据不对时,需要修改相应的电路或者程序。通过实际应用发现,该测试系统测试结果准确并且稳定可靠。
6结论
经过试验测试得知,对于水下机器人舱体和舱内的基本环境监测问题,如水下机器人的姿态、舱内的温湿度、下潜深度和水下景象,传感器数据和视频数据都能够实时地采集,PC104与微型计算机之间的通信能够准确无误地传输,对于水下机器人周围环境的监测起到了实时监控的效果,为将来水下机器人的自主导航提供了有利的条件。
- 14个环境监测系统设计案例,包括完整软硬件设计(10-29)
- 基于微型计算机控制技术的检测设备方案设计(03-27)
- 于PC104与C8051F120的水下机器人环境监测系统设计(10-22)