基于PIC16C72的水位水温控制器的设计
为满足落水式太阳能热水器自动控制的要求,设计了一个基于PIC16C72单片机的水温水位控制器。以NTC热敏电阻作为测温传感器,用PIC16C72内置的多路8位A/D转换器把NTC热敏电阻上的压降转换为数字量实现测温。通过非对称多谐振荡器电路把水位传感器的等效电阻转换为振荡信号的频率,然后用PIC16C72内置的计数器测量频率的高低,实现对水位的测量。介绍了控制器的工作原理、完整的硬件电路和功能。该设计省去了温度测量信号调理电路、专用A/D转换和输出译码驱动芯片,具有硬件系统组成简单、可靠性好的特点。
太阳能热水器因具有节能环保、使用费用低廉等优点正快速进入千家万户,与太阳能热水器配套的水温水位控制器十分方便用户的使用,产品市场前景好,被受到广泛重视和研究。但当前使用的水温水位控制器仍存在着许多缺馅,如按键功能设计不合理,需要复用按键,用户操作离不开说明书,操作仪表复杂,给用户带来了许多麻烦;选用的水温传感器参数和测量电路不合理,容易因热击穿损坏;水位传感
器容易结水垢或开裂故障多,使用寿命短,维修成本高。迄今为止,国内外还没有质量过关的水温水位控制仪。针对上述问题,为使控制器的功能更全面实用,操作更简便、直观,提高传感器的可靠性,降低维修成本,笔者结合PIC单片机和NTC热敏传感器技术,设计了一个适用于落水式太阳能热水器的控制器。
1 系统结构和工作原理
该控制器主要是用于测量、显示落水式太阳能热水器水箱中的水位和水温,上下水管道温度,控制电磁阀上水、控制辅助电加热及管道防冻电伴热带等。它主要由单片机PIC16C72、水箱温度和管道温度传感器、水位传感器及测量电路、输入按健、用水水流开关、电磁阀控制、电加热控制和电伴热带控制等部分组成。控制器结构框图如图1所示。单片机PIC16C72作为控制的核心,通过执行程序实现对系统各部分的控制。水位测量模块实现水箱水位的测量,温度测量模块实现储水箱水温、上下水管道温度的温度测量。三路控制输出通过继电器分别控制上水电磁阀、电加热器和防冻电伴热带工作。LED部分显示水箱水位,水箱水温及显示相关参数,按健部分用于选择工作模式、设置相关参数、手动控制上水或电加热。水流开关用于测量用水状态。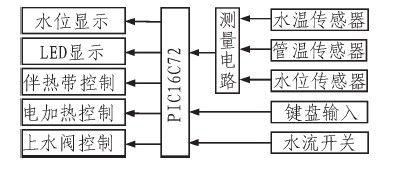
图1 系统结构框图
2 系统硬件设计
设计的控制器以单片机PIC16C72为控制核心,控制器的电路如图2所示。单片机PIC16C72内有2个计数器,内置一个五通道8位A/D转换模块,带有2K的OTP程序存储器。这里测量水位的方法是用非对称式多谐振荡器电路把水位传感器的等效电阻大小转换为振荡信号频率的高低,由单片机内置的计数器对频率计数,实现水位的测量。储水箱水温、上下水管道温度的测量方法均是利用热敏电阻与固定电阻串联分压,把温度的变化转换为热敏电阻上压降的变化,利用单片机内的多通道8位A/D转换模块对这二路温度电压信号进行A/D转换后,由程序读取和处理。程序控制PORTB口分时作键盘输入口和显示输出口。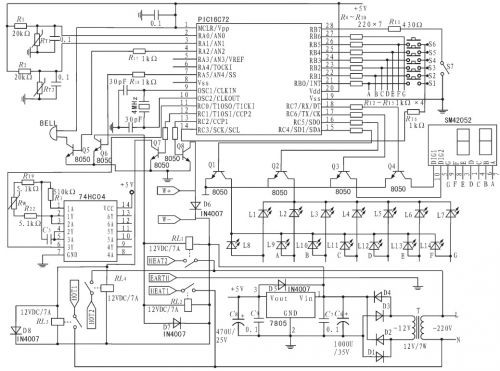
图2 控制器硬件电路
2.1 水位测量
水位传感器的长期可靠性是水位测量的关键。早期曾采用半导体压力传感器来测水位,由于水垢堵塞水压传导管,在应用一段时间后因不适用测量水位环境要求而放弃。这里采用非对称式多谐振荡器电路把水位信号转换为频率信号作为水位测量方法。在图2中,非对称式多谐振荡器由74HC04和电容C5,电阻R3,R19,R22和水位传感器的等效电阻Rw组成。该电路的振荡频率为1/[2.2(R19+R22+Rw)C5].这里是把若干个电阻相串联,在电阻间的引线处引出水位探测电极,作为水位测量传感器。由于水有导电性,水位的变化可引起水位探测电极间的短路,这会改变水位传感器的等效电阻Rw的大小,从而使振荡器频率变化。该信号经非门隔离后由74HC04的引脚6输出到单片机的引脚T1CKI,由PIC16C72片内计数器T1对振荡信号的频率计数。水位传感器的串联电阻参数的选择是有效测量水位的关键因素。通过大量的实验发现,在上述多谐振荡器电路中,当选用电容C5为0.1μF,水位传感器由30,10,10,10kΩ的4个电阻相串联组成水位传感器时,测量水位时传感器的等效电阻值在60~0 kΩ之间变化,多谐振荡器的振荡信号的频率在60~415 Hz之间,测量水位效果较好。水位传感器的结构形式、电极材料类型是影响水位传感器使用寿命的重要因素。用导电硅胶材料做水位传感器的导电电极并采用双电极备份结构,较好地解决了因水位传感器故障经常出现的跑水问题。
2.2 温度测量
下面以水箱水温的测量方法为例说明测温原理。在图2中,RT1是热敏电阻,用来感应水箱水温。电阻
- 测量NTC热敏电阻的注意事项(12-29)
- NTC热敏电阻测量温度的注意事项(12-28)
- I/O口RC充放电测电阻在直发器温控中的应用(04-01)
- 思博伦为EANTC年度测试活动提供支持(05-31)
- 无线传感器网络节点太阳能电源系统设计(04-17)
- 高效微型太阳能逆变器测试方法(06-24)