激光传感器在车辆宽高超限检测中的应用
本系统以德国SICK公司的LMS系列户外型非接触式激光传感器为数据采集设备,用工控机作为数据的处理设备,系统组成如图2所示。LMS系列传感器是一种户外型非接触式的高精度、高解析度外部传感器,其工作原理是基于对激光束飞行时间的测量,其按照定义好的时间间隔发出激光脉冲,通过定时器计算发射脉冲和接收脉冲之间的时间间隔来得到与被测物体之间的距离。脉冲激光束经过测距传感器内部的一个旋转反光镜的反射对周围环境形成扇面扫描。目标物体的轮廓线曲所接收到的一系列脉冲序列来确定。LMS传感器的扫描频率是25Hz/50Hz,角度频率是(0.25°/0.5°,扫描角度范围是0°~270°,最大扫描距离是20m,标准测量精度为±0.30m,安全防护等级为IP67,对人眼安全。恶劣的环境因素对测量范围没有影响,可用于室外温度-30~+50℃的环境中。LMS系列激光传感器采用激光脉冲测距的方法计算出被测物体的扫描轮廓线上若干点到传感器的距离,并以极坐标的形式实时地通过高速网络接口上传给工控机进行后期处理。由于网口的数据传输速度可达100Mb/s,所以不会出现数据丢失问题,保证能实时地完整地将所测数据上传到工控机进行数据处理。工控机通过可视化编程语言VB的网络通讯内核Winsock与LMS系列传感器直接进行数据的交换。在使用Winsock控件时,首先要考虑使用TCP还是UDP通信协议。TCP通信协议控件是要求连接的通信协议,类似于电话系统。在开始数据传输前,使用者必须先建立连接,其上还有错误检查机制,避免数据被分散传递,因传输的过程较慢而错误较少。如果数据是比较重要的,使用此方式比较好。而UDP通信协议是一种不需要连接的通信协议,两台计算机之间的传输类似于传递邮件:信息从一台计算机传送到另一台计算机,但是两者之间没有明确的连接。由于和TCP的方式比起来,它的错误检查比较简单,因此速度比较快,要求速度时,使用此方式比较恰当。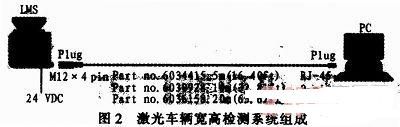
本系统对于数据的实时性要求比较高,且对数据的准确性要求相对较低,所以数据交换之前,首先要分别将LMS系列传感器和工控机的IP地址设置为一个网段,再使用UDP通信协议来进行数据的交换。工控机接收到LMS系列传感器上传的极坐标信息后,再通过基于VB内核设计的数据处理程序对所有数据进行处理,数据处理的过程如下。
首先,通过传感器上传的数据判断车辆的驶入与驶出。
第一步,传感器上传测量到的传感器到被测车辆的不同点的极坐标的极半径(ρ1,ρ2,ρ3,……,ρn)和对应的极角(θ1,θ2,θ3,……,θn);
第二步,通过坐标系的变换将被测点的极坐标转换为平面直角坐标,即
(x1=ρ1·cosθ1,y1=ρ1t·sinθ1)(x2=ρ2·cosθ2,y2=ρ2·simθ2)(x3=ρ3·c∞θ3,y3=ρ3·sinθ3)……(xn=ρn·cosθn,yn=ρn·sinθn);
第三步,分别比较y1,y2,y3,……,yn,取最小的y值ymin;再分别比较x1,x2,x3,……,xn取扫描到的被测车辆的最左边的x值xmin和最右边的x值xmax;计算单次扫描的车辆的最大高度Height=H-ymin和最大宽度Width=xmax-xmin(H为传感器距离地面的高度)。将备单次测量所得的宽度与高度进行比较,根据数据的变化曲线来判断进车与出车。
然后,通过比较各单次测量的车辆的宽度和高度信息进行逐次比较,计算车辆的最大高度Height和最大宽度Width。最后,将得出的过往车辆的最大宽度和最大高度,与国家规定的车辆宽高限制值相比较,从而判断过往车辆是否超宽超高,比较的结果通过工控机的显示器显示出来,同时保存测量结果到SQL数据库。如果车辆超宽超高的话,工控机还会产生声光报警,以提醒治超人员和超限车辆的司机出现了超限问题。
3 实验结果及分析
本系统中的激光传感器安装在应用现场高度为6m的龙门架上,激光传感器的扫描测量扇面区域垂直于车道,有车辆穿过扇面扫描区域时,检测系统自动计算出该车辆的宽度和高度值,并且显示在工控机的显示器上供工作人员监控用。
现场实验过程中,随机对30辆不同样式的通行车辆分别用人工方式和自动方式测量车辆的宽度和高度(以下分别称为实际值和测量值)。统计分析结果表明本系统自动测量数据的误差在0.10m以内的有28辆。在0.15m以内的有2辆。即有93%的车辆检测误差小于0.10m,这满足用户所提误差小于0.15m的要求。数据分
- 基于DLMS/COSEM协议的智能电表设计(08-24)