3-D轮廓测量中相位解包裹应用
种途径获得。根据不同应用的需要,可以选择实现不同功能的不同复杂程度和不同灵敏程度的模板标记方法.本文提出三种不同类型的模板标记方法,用以在不同的应用需求下选择使用:1、子区域相容性判断法;2、边缘检测法;3、干涉图灰度差值提取法.对应于不同标记模板的方法,我们给出了它们应用于相位解包裹算法中的具体应用实例,各方法均由MATLAB编程实现。
2.1 子区域相容性判断法
2.1.1 方法
这种方法在包裹相位图的基础上进行判断。判断一个像素点是否相容,需要利用其周围的另外三个像素点的信息。这四个像素点组成一个2×2的子区域(图3)。按顺时针方向计算这四个像素点两两之间的灰度值之差,得到Δ1、Δ2、Δ3、Δ4;然后确定一个阈值T(如T=π),该阈值就是用来判断相位条纹跳变边界的那个"固定阈值",并由此阈值判断Δk,(k=1,2,3,4):如果|Δk|>T,即可认为路径穿过了跳变的界线,此时,若Δk>0,则Δk=Δk-2π,若Δk<0,则Δk=Δk+2π,目的是将Δk限定在-π到π之间;最后求ΣΔk,再次作判断:如果ΣΔk=0,则该点定义为相容点,如果ΣΔk≠0,则该点定义为非相容点[6]。
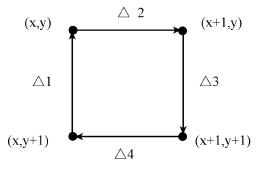
图3 标记2×2区域相容性示意图
2.1.2 实验结果
图4是一幅通过模拟得到的包裹相位图(左)及使用子区域相容性判断法得到的模板图(右)。包裹相位图中的黑色小方块是加入的非相容区域,从模板图可以看出,使用子区域相容性判断法可以将此非相容区域很好地提取出来,然而,它在识别出噪声点的同时,一部分相位跳变边缘也被识别成了非相容点,以至于相位解包裹之后一些原本好的数据点也被绕过,见图5。
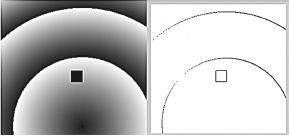
图4 模拟的包裹相位图(左)及使用子区域相容性判断法得到的模板图(右)
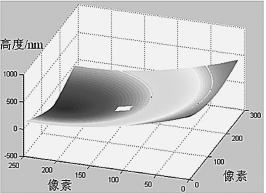
图5 使用子区域相容性判断法获取模板得到的相位展开结果
子区域相容性判断法理论上可行,但实验结果证明其不太适合用于实际应用,特别是噪声多,结构复杂的测试.但由于此方法运算速度非常快,而且对噪声、断点等灵敏度很高,所以当图像区域小,噪声点远离相位跳变边缘时,仍可以考虑使用。
2.2 边缘检测法
2.2.1 方法
此方法在由干涉图合成的亮场图像上运用边缘检测算法来提取非相容区域的边缘.在五步相移干涉测量中,由得到的五幅干涉图像可以合成为被测表面的亮场图像[9],公式为:
式中的Ii为第i幅干涉图中一个像素点的灰度值(i=1,2,3,4,5),Ibf为对应像素点亮场图像的灰度值。得到整个待测区域的亮场图像之后,接下来选择合适的边缘检测算法得到非相容区域模板。应用于边缘检测的算子有很多,最常用的有Sobel,Prewitt,Roberts,Canny和Laplacian ofGaussian(Log)等几种。由于它们使用不同的梯度算子和检测法则来确定边缘区域,因此具有不同的特点.Sobel算子和Prewitt算子类似,对噪声有一定的抑制作用,但容易检测出伪边缘并丢失有用的边缘信息;Roberts算子的检测定位精度比较高,但对噪声敏感;Canny算子的最优化逼近算子和双阈值的使用使其能有效抑制噪声,并能精确确定边缘位置;Laplacian of Gaussian(LoG)算子选择滤波的尺度参数是关键,小尺度的LoG算子可以得到比较准确的边缘定位,但对噪声较为敏感,大尺度的LoG算子滤波效果较好,但过度平滑图像,容易丢失如角点这样的边缘信息[10-11]。
2.2.2 实验结果
图6为图2所示的圆形薄膜部分的一幅干涉图像(左)和由五幅干涉图像合成的亮场图像(右)。使用MATLAB中的edge函数,可以很方便地得到使用不同边缘检测算法得到的边缘提取结果,如图7(阈值均为缺省设置)。
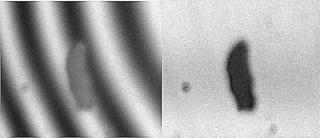
图6 圆形膜部分的干涉图及亮场图像
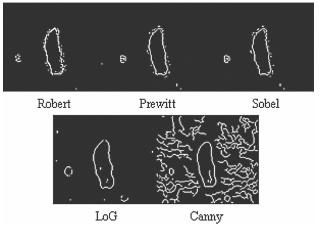
图7 使用不同算法得到的边缘检测结果
从上图结果可以看出,只有使用Canny算子的结果得到了非理想数据区完整闭合的边缘。图8是对Canny算法的阈值进行改变得到的结果。可见,当阈值设定为(0.3,0.6)时可得到所需剔除区域的完整边缘。将相应的标记有非相容点边缘的模板代入到生长法程序中,得到解包裹结果如图9。
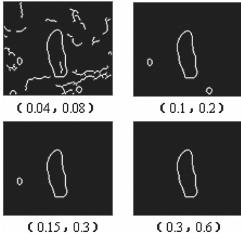
图8 更改Canny算法的阈值得到的结果
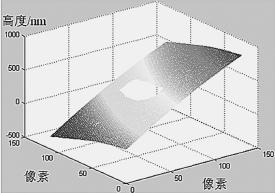
图9 使用边缘检测法获取模板得到的相位展开结果
使用边缘检测来获取相位解包裹模板的方法使用方便,并且可以根据具体应用选择合适的阈值来进行灵活控制,比较适合应用于具有孔洞等非相容区域的被测表面的相位解包裹运算中.然而,由于干涉测量中噪声的影响,合成的亮场图像本身已含有误差,应用于大范围的比较复杂的表面时这种方法则较难在控制噪声和精确定位边缘之间找到平衡。
2.3 干涉图灰度差值提取法
2.3.1 方法
这种方
- 旋转状态下动态倾角测量系统设计(10-28)
- 意法半导体在数字输出三轴加速传感器中嵌入智能功能(10-23)
- 工业应用中的测量(02-23)
- 基于ADISl6355 MEMS的惯性测量组件系统设计(03-07)
- 基于傅里叶变换的MEMS地震检波器设计(11-22)
- 基于nRF905的无线加速度测量系统设计(09-12)