关于GPS的航标遥测系统数值的处理
据,然后对其求平均值作为测量估计值,这样可以使得偏离真值的正负误差相消,从而使测量值更接近真实值。本课题将前面所取得的n-2m次测量数据作算术平均,且存于固定的算术平均值存储单元,并根据以后所读数据进行实时修正。这样有:
X=(Xswn)/(n-2m);Xi=(Xsumi)/(n-2m).
其中,X是初始化时所求平均值,作为一个平均基准存于存储单元。Xi是每读一次数据所求平均值,作为位置评估值应用于位置飘移判断控制中。
进退递推滤波法:前面两者都是读取一定数据以后再作后处理,而测量过程中必须对所测数据进行实时处理。所以,所测量经纬度的变化趋势必须反应出来,以便航标因为意外而漂出所给定范围时能实时向监控中心发送警报信息,从而进行修正。本文根据实验与观察的结果,采取进一新数退一平均数的进退递推滤波方法,即:
Xswni=Xsum_i-1+Xi-1+xi
限幅滤波法:在测量过程中,常常会碰到偏离中值较远的粗大误差。这对经过前面几种滤波法处理后的数据基准会产生较大的冲击,限幅滤波法就是针对这一思想的。设定一个阈值,当所测数据与基准数据比较后,差值超过阈值就认为是粗大误差并舍掉。但是本课题中如果航标灯因意外而漂出很远,就必须能识别出来,而不能当粗大误差全部舍掉。所以在控制程序中专门设计了一计数器对舍掉比率进行计数,如果舍掉比率大于某一值则重新初始化,即重新读取n-2m次的和基准及其算术平均基准。
图2、图3、图4分别是对利用Visual Basic6.0开发的数据采集与处理程序采集的10小时GPS数据进行几种数据处理后的坐标示意图(其中,横坐标、纵坐标分别表示经、纬度)。从这三个图中可以看出,从图2到图4,数据收敛性依次增强,可见综合几种滤波法于数据处理中,将大大减少误差,提高系统精度。
2.3 控制流程
系统控制流程图如图5所示。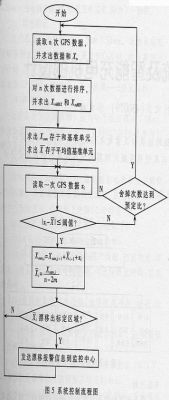
本文通过大量的实验与测量观察,深究了GPS OEM板的误差来源及规律,并采取了相应的数值处理方法及控制策略,大大提高了GPS OEM板在遥测系统中的应用价值和可靠性,保证了航道维护中标灯的位置遥测监控的准确性与安全性,是GPS OEM板-个很有意义的应用实例.
- 基于GPRS的水文信息无线远程监测系统(10-22)
- 一种靶场新型遥测发射机的研制(07-13)
- 基于GPS的电压向量测量的新方法及其应用(10-30)
- GPS测量误差(10-09)
- 欧洲伽利略计划使用Pendulum时间/频率方案(11-03)
- 如何降低GPS测试成本(11-26)