船载雷达回程误差分析及消隙设计
中,精度较低的传动机构(如圆锥齿轮机构、蜗杆蜗轮机构)适宜布置在高速轴上,这样可减小低速轴上的误差。
2.1.2 采用消隙机构
消隙机构的型式很多,下面简单介绍3种。
1)中心距可调消隙机构 在装配时根据啮合情况调整中心距,以达到减小齿隙的目的。对于减速轮系,最后一级的齿轮副对回差的影响最大,因此将最后一级齿轮副设计成中心距可调,最为有利。
2)弹簧加栽浮动齿轮消除机构 这种方法是依靠弹簧加载,使齿与齿紧密啮合而达到消除的目的。
3)双传动链弹簧加栽消隙机构 它有两台伺服电机,各自通过一套齿轮箱后驱功末级大齿轮。这两台伺服电机的激磁绕组是串联的,以使它们的激磁电流和转矩常数相同。电机的后伸轴分别通过一对锥齿轮与预载扭簧相连,预载扭簧给传动系统中的齿轮加了一个偏置转矩,从而消除了齿隙。
2.2 电路措施
这种消隙方法是用两个相同的传动链连接两个伺服电机到末级大齿轮,这两个电机分别加电控制:低负载力距时,在这两个电机之间建立一个偏置电压或偏置电流,从而得到一个偏置转矩,消除齿隙;而高负载力矩时,偏置转矩自行取消,负载力矩由两个电机分担。采用双传动链电消隙机构可以显著减小回程误差。
3 电消隙设计
3.1 力矩偏置电路
在电消隙机构中,两个伺服电机分别由两套可控硅功率放大器控制。相对功率放大器来讲,假定1#马达电枢正接,2#马达电枢反接。1#马达和2#马过中的电流都可分为两部份Id和I偏,Id是马达驱动负载的电流,但必须Id1和Id2方向相反才能驱动负载运动;I偏是用于电消隙的偏置电流,I偏1和I偏2必须大小相等,方向相同才能产生大小相等方向对顶的偏置力矩。
根据电流指令控制要求设计产生偏置电流指令信号的电路,简称为力矩偏置电路。利用两个电流环的负载电流指令提取Id1和Id2信号,通过偏置电路去控制偏置电流指令的形状,可以使偏置电路成为一种函数发生器,使偏置电流指令成为负载电流的函数。
图3是力矩偏置电路图,Ugi为速度调节器输出的负载电流指令,U偏是偏置电流指令,U△是差速振荡抑制电流指令;N1为梯形函数发生器。调整电位器可以调整偏置力矩的大小。
3.2 消隙实现
如果不考虑抑制差速振荡的马达力矩,则两个马达的力矩M1和M2与负载电流指令的关系如图4所示。
图4中,Ugi为速度调节器输出的负载电流指令。
当Ugi=0时,M2=-M1=M0,M0称为偏置力矩值。
当Ugi由0正向增加不太大时,保持M1、M2反向,仍能消隙,此时由2#马达拖动负载和1#马达前进。
当Ugi正向增加到U0时,M1=0,1#马达在齿隙中游移。但2#马达仍拖动负载,其齿轮箱不会出现齿隙,负载不会游移。
当Ugi>U0时,1#马达穿过齿隙与2#马达共同推动负载,但M2>M1。
当Ugi≥U1时,偏置力矩开始减小。
当Ugi≥U2时,偏置力矩完全消隙,两台马达以相等的力矩推动负载。
可以看出,在一般工作情况下,负载至少和一个马达之间无齿隙,不会游移。但是,当力矩快速反向而且其值又比较大时,仍有可能产生两个马达同时穿过齿隙的情况,但这种情况在实际使用时并不多。
4 结束语
双马达电消隙系统应用于船载雷达,经实践检验效果良好。采用雷达跟踪信标球方式进行测角精度统计,其结果如表1所示。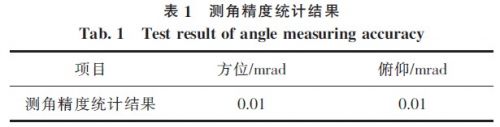
由上表可以看出,方位和俯仰测角随机误差满足0.2 mrad的指标要求,大大提高了船载雷达的测量精度。
在精密雷达天线驱动系统中,双马达或多马达驱动除了能实现电消隙、提高测角精度之外,在传递同样力矩的前提下,双马达驱动比单马达驱动所用的齿轮箱体积小,重量轻,易于加工制造;也就是说,在齿轮箱总体积相同的情况下,双马达驱动能提高传动链的刚度。