基于PXI平台的ESP系统性能测试平台
挑战:
电子稳定系统(Electronic Stability Program, 简称ESP,下同)实车道路试验不仅对场地要求十分苛刻,实验过程具有相当的危险性,而且所需测量的信号较多。实验数据采集系统不仅要能够采集各种信号,还要能够在恶劣的测试环境中(如冲击、震动、高温、高湿度等)稳定可靠的工作。
解决方案:
面对ESP系统试验苛刻的测试环境、众多的测试信号,基于NI PXI和LabVIEW的测试平台,我们在较短的时间内快速融合了模拟信号、数字信号、CAN、串口等多种信号采集与处理。NI数据采集系统在海南试验场成功完成了ESP试验过程的数据采集,保证了试验的顺利进行。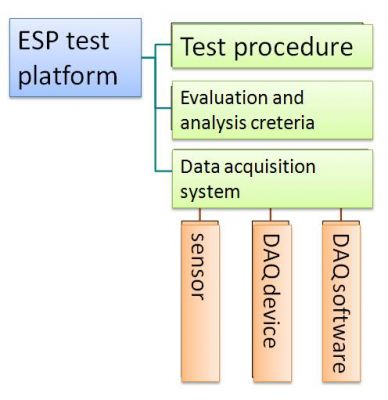
汽车电子稳定控制系统可以辅助驾驶员对车辆的动力学特性进行控制,通过控制车轮的制动力和发动机的输出力矩来控制汽车的横摆角速度并将侧偏角限制在一定范围内,从而协助驾驶员在极限工况下保持汽车的稳定性,防止车辆出现失稳危险。
近年来,随着人们对车辆主动安全性要求的提高和各国相应安全法规的推动,ESP系统在汽车上的标准装配率迅速提高,博世、大陆等国外汽车电子产品供应商均具备了ESP系统的批量化供货能力并占据了市场的主要份额。
国内ESP系统的研究起步较晚,大多停留在理论控制研究与硬件在环仿真阶段,国内整车及零部件厂商大多直接采用博世、大陆、TRW等的ESP系统与自主开发的整车相匹配。
相对于国内ESP系统策略的研究,ESP系统性能测试评价方法的研究基本空白,大多数验证实验均参考国外零部件商或相应机构的试验方法或直接将测试试验委托供应商实施。目前,国内汽车行业尚无形成统一的ESP测试标准,这使得国内整车厂商很难系统合理的评价ESP控制性能,更无法根据试验的结果在产品设计阶段对汽车电子供应商提出完善的产品设计技术要求,大大增加了整车厂商与汽车电子供应商的底盘电控系统匹配设计周期和研发成本。
鉴于上述情况,课题组结合当前的研究基础,提出一套汽车底盘电控系统性能评价和实验测试流程规范并构建了一个用于ESP系统试验测试的测控系统平台。
ESP系统测试平台
课题组搭建的ESP系统测试平台主要包括三大部分:
1. ESP试验测试流程规范;
2. 试验数据采集系统;
3. 试验评价标准。
试验测试流程规范规定了ESP测试所需的试验项目、试验目的、测试变量和仪器、试验条件、试验方法,以及实验数据处理方法。
试验评价标准作为电控系统以及整车性能评定的指南,从汽车相关基本理论出发,规定了性能好坏评定的方法与相应原理。
试验数据采集系统包括试验中测量所需变量(车辆参数和运动状态)的传感器及其数据采集卡和相关软件。试验数据采集系统性能好坏在一定程度上决定了整个测试系统能否准确评价整车性能以及ESP系统的优劣。
ESP作为最新一代汽车主动安全系统,ESP是基于汽车动力学对汽车临界失稳状态下施加准确控制来提高汽车稳定性的系统。因此为了验证ESP系统的性能,就需要大量实车试验。完成试验数据采集将面临两大难题:一是,测试设备众多(GPS、陀螺仪、非接触式光电测速仪、轮速传感器、压力传感器、触发器等,如图2所示),二是,测试环境恶劣(冲击、震动、高温、高湿度等)。通过调研,我们选择了LabVIEW 和 PXI的测试平台。
ESP试验数据采集系统所依赖的数据采集设备采用了NI PXI系统以及相应的PXI数据采集卡,上述系统与测试所需的传感器构成了ESP试验数据采集系统的硬件部分,,传感器、触发器通过接线盒及电缆与采集卡或机箱相连。硬件系统搭建的过程中,我们遇到了一个问题:我们采用的PXI机箱需要220V交流供电,而试验测试中车载电源是12V直流蓄电池,对此我们采用了逆变器将12V直流电转变为220V交流电,然后直接供给PXI机箱。为了避免汽车运行过程中蓄电池电压波动对传感器造成损坏以及影响测量准确度,传感器供电没有直接采用蓄电池电源,而是通过稳压器将220VAC转换到12VDC,进而供给相应的传感器,电源系统架构如图3所示。220V交流逆变器和PXI机箱安装在测试车辆后备箱的铝合金支架上,如图4所示,支架通过螺栓与车身地板相连,从而保证机箱在车辆行驶过程中不会晃动。
数据采集系统软件是在LabVIEW中实现的,主要应用了LabVIEW中数据采集模块、及文件IO模块,针对众多的测量信号,编程中我们采用了各信号分别采集、同时存储的架构,由于试验中采样率不高(20Hz),信号同步要求不高,故采用了局部变量进行信号的同步存储。整体程序框架如图5所示。程序前面板如图6所示,前面板主要分为两个区域,左侧区域为配置区,主要用于试验过程中
- 基于LabVIEW和PXI平台的6-DOF并联机器人控制系统的开发(04-19)
- 基于PXI平台的集成化EDGE手机多功能测试系统(03-23)
- PXI平台实现同步高速多通道数据采集(02-06)
- 基于LabVIEW和PXI平台的并联机器人控制系统的开发(07-25)
- 基于虚拟仪器的激光性能参数测量系统(06-26)