双目立体视觉中靶标的设计与识别
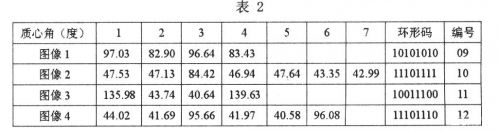
由于起始编码点一定存在,故将其环形码相应位置"1"。对于8位编码标志点,当8个编码点都存在时,各个相邻编码点间的质心角均为45°。利用这个信息,按照存储顺序,将求得的质心角θn分别与45°的整数倍进行比较,如果相等,表示在该角度位置存在一个编码点。实际操作中,编码点质心角θn值是根据图像处理中求得的编码点质心与中心标志点质心值计算所得,由于误差的存在,质心角θn值的实际值往往与理论取值(m×45°,1≤m≤4)有出入,所以在判断某个角度位置是否有编码点存在时,可以先设定一个误差允许范围δ(0≤δ<22.5°),如果θn的实际值介于理论值±δ的范围内,就说明该角度位置上存在编码点,将环形码相应位置"1"。通过循环,对编码点质心角θn的实际值逐一判断,看其是否在上述的取值区间内,从而决定将环形码相应位置"0"或置"1"。
如前文所示,同一个编码标志点对应的环形码不唯一,将该环形码在任意位置处截断后,再将后一子序列置于前一子序列之前(此操作称为"循环截断"),所得到的序列仍然表示该标志点,这里称这些序列为"同胚"序列。因此,预先将每个标志点的编号和给定的逆时针顺序下它的最小循环码存储起来。识别时只要得到一个最小环形码的"同胚"特征序列,将该序列反复做循环截断,直到它等于最小环形码为止,根据后者即可取出对应的编号。
2.2 非编码标志点的识别
由于编码标志点的唯一性,通过对编码标志点的识别可以确定出靶标的编号,从而得到靶标上各靶标点的空间位置。靶标上的其余非编码点均为正方形,且和编码标志点有确定的位置关系,都可以通过角点检测等步骤实现对其图像的识别,从而完成对整个靶标的识别。
3 数值实验
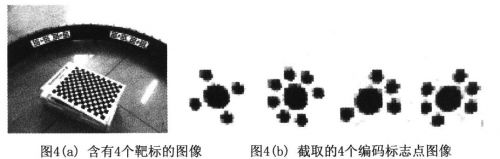
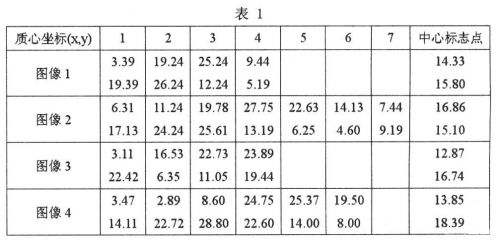
在本文的实验中,只用到其中的12个编码标志点,我们按其在圆形导轨内侧顺时针排列的顺序进行重新编号。为验证所提算法的效果,对拍摄的多幅图像进行了数值实验,其中一幅如图4(a)所示(由于页面原因,对图像作了裁剪和缩小,但保留了所有有效信息)。图4(b)为从这幅图像中按顺时针顺序截取出的四个编码标志点的图像。表1给出了各幅编码标志点图像中每个圆的质心坐标值。表2给出了实验中得到的各幅编码标志点图像中相关质心角的值、环形码值及编码标志点的编号。实验表明,该算法对任意一幅图像中编码标志点的识别率接近100%。
4 结论
在双目立体视觉中,靶标识别问题对于目标图像的重构起着关键性的作用。本文提出了基于质心角的方法,对各幅编码标志点图像进行准确的识别。通过大量的数值试验,验证了此算法的有效性,实验结果表明,本文提出的基于质心角的标志点识别算法,对于采用本文所用的特定平台等背景不太复杂的情况具有很高的识别性和实用性。通过编码标志点的准确识别及相对确定的位置信息,即可通过对角点的检测,实现对整个靶标的准确识别。