三种测风设备测量精度的对比分析
设备的海拔高度和其探测高度,风能梯度塔可以分别得到海拔1162m的分钟平均风速、海拔1164m、 1170m、1180m、1190m、1210m、1230m、1260m的分钟平均风速及分钟平均风向;而风廓线雷达低层高度分辨率为50m,因此仅能得到海拔1157m、1207m、1257m分钟风速、风向。
本文首先对风能梯度塔1162m分钟平均风速与风廓线雷达1157m分钟风速进行比较,共选取相应时间的探测资料326组,风速差值由风能梯度塔测得的风速值减去风廓线雷达测得的风速值得到,具体比较结果如图1所示:
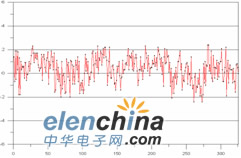
图1 风能梯度塔1162m分钟平均风速与风廓线雷达1157m分钟风速差的分布图
从图1可以看出,两者的风速差分布相对比较均匀,风能梯度塔测得的风速值比风廓线雷达测得的风速值要偏大一些。经计算,风能梯度塔的平均风速为8.2m/s,而风廓线雷达的平均风速为7m/s,两者的风速平均差为0.37m/s,标准差为1m/s(见表一)。
另外,本文分别对风能梯度塔1210m分钟平均风速、风向与风廓线雷达1207m分钟风速、风向以及风能梯度塔1260m分钟平均风速、风向与风廓线雷达1257m分钟风速、风向进行比较,分别选取相应时间的探测资料193组、165组、138组、146组。图2、4的风速差是用风能梯度塔测得的风速值减去风廓线雷达测得的风速值得到的,而图3、5测得的风向差则是由风廓线雷达测得的风向值减去风能梯度塔测得的风向值,具体比较结果如图2、3、4、5示。
图2、4显示,风能梯度塔1210m、1260m平均风速与风廓线雷达1207m、1257m分钟风速的偏差分布相对比较均匀,风能梯度塔测得的风速值比风廓线雷达测得的风速值明显偏大。经计算,两者的风速平均差分别为1.85m/s、1.76m/s;标准差分别为0.82m/s、0.83m/s。
而从图3、5风向的对比来看,风向偏差的总体走势趋于一致,且图5前半段显示,两种测量手段的风向相差无几,而后半段两者的风向有了较大的变化,风向差也有所增大。经计算,两者的风向平均差在1210m左右时为11°,1260m左右时为6.6°;相应的标准差分别为12.7°、11.1°(见表1)。
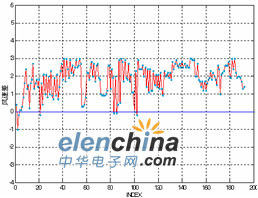
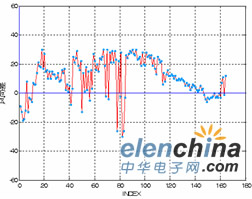
图2、3 风能梯度塔1210m平均风速、风向与风廓线雷达1207m分钟风速、风向的偏差分布图 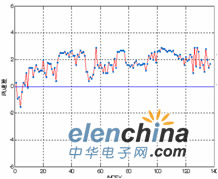
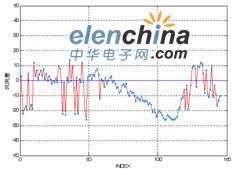
图4、5 风能梯度塔1260m平均风速、风向与风廓线雷达1257m分钟风速、风向的偏差分布图

3.2 风能梯度塔、风廓线雷达、微型探空飞机三种探测设备的测风资料对比
本节采用9月24日下午13:30-15:00飞机试验过程中得到的微型探空飞机数据,并选取相应时间相同高度层的风廓线雷达数据及风能梯度塔数据进行比较。得到的三种探测设备的风速、风向对比结果如图6、图7所示。本次比较共选取微型探空飞机、风廓线雷达资料各30组,而风能梯度塔由于受到高度限制,进入比较的数据只有9组。计算可得,探空飞机与风能梯度塔测得的风速非常相近,两者平均差仅为0.9m/s.而与风廓线雷达测得的风速相差偏大,平均差达3.4m/s。
由图7并结合计算数据可知,微型探空飞机测得的风向与风廓线雷达测得的风向非常吻合,两者平均差仅为0.47°.而微型无人驾驶探空飞机与风能梯度塔的风向平均差为7.1°.
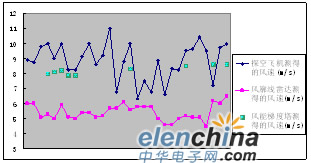
图6 相同时间相同高度层三种探测设备测得的风速资料的对比
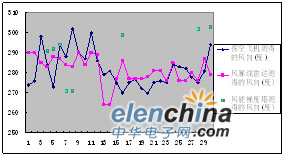
图7 相同时间相同高度层三种探测设备测得的风向资料的对比
3.3 结果分析
本文共采用两种方式对三种探测设备的获得的测风资料进行对比分析,分析结果表明风廓线雷达最低层与风能梯度塔最低层数据比较风速差别较小,仅为0.37m/s。而风廓线雷达第二层、第三层数据与风能梯度塔相应层数据比较差别稍微偏大一些.另外,如图6所示,1200m-1400m之间三种探测设备的探测数据比较结果表明微型探空飞机测得的风速与风能梯度塔测得的风速差别甚微,而与风廓线雷达测得的风速差别较大,平均差为3.4m/s,主要原因是进入比较的风能梯度塔数据偏少,另外,两者的测风原理与风场反演方法差异太大也是造成这一结果的一个重要原因。图7的风向比较显示微型探空飞机与风廓线雷达、风能梯度塔测得的风向均有较好的一致性。
综合上述比较结果,引起对比出现差异的主要因素有:(1)观测方法的差异,即各种探测设备的探测原理各不相同,探测的目标也存在一定的差异,探测数据必然存在误差;(2)数据处理方法的差异,即各种风场反演的方法存在很大不同。风廓线雷达测风是对其上空一定高度层及探测范围内风的平均值;而风能梯度塔是对特定位置的风的测量,是对分钟风的一个平均;飞机测量的是飞行周期内飞机经过轨迹点的风的平均;(3)有效数据的数量与质量,本文选取的数据均是经过剔除最大误差后的数据,因此数据质量可以得到保证,但由于受到条件限制,能同时用于三种探测设备比较的数据量偏少,这也在一定程度上影响了比较结果的准确性;(4)资料的同时性和同地性,资料的同时性和同地性越好,得到的对比结果越具有参考价值,由于本次试验过程中天气系统相对稳定,探测设备间距很近,且各探测设备的时间分辨率均不大,因此本次实验条件基本满足同时性和同地性原则。
- 风速测量仪器(12-29)
- 探讨含粉尘的风压及风速测量的防堵方案(10-18)
- 基于Virtex5高性能FPGA的脉冲激光测距系统设计(01-02)
- 用于雷达测试和验证的自动化测试设备(05-15)
- 用于系统级测试和PCB配置的高级拓扑结构(05-16)
- 使用LabVIEW重写电子战争模拟程序(06-14)