基于数字图像处理技术的集成块姿态检测
0 引言
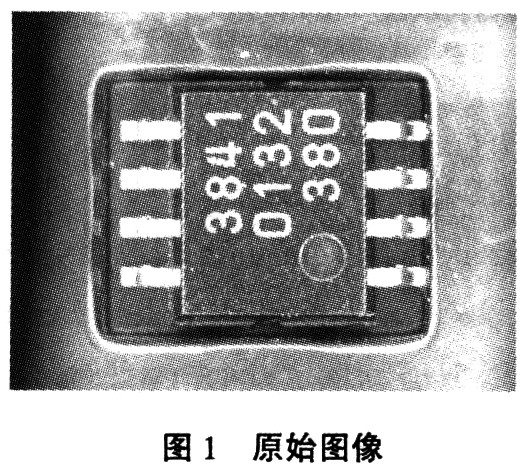
近年来,我国的半导体产业蓬勃发展,由于其起步较晚,虽然生产的很多环节实现了高速自动化,但集成块的质量检测还主要借助于人的视觉和主观判断能力,因而占用的大量的人力,且由于受到个人的视力、情绪、疲劳、光线等因素的影响,工作效率低,分选差异大。本文所研究的即是计算机工业图像检测技术在集成块管脚检测中的应用,相比较传统的人工检测,计算机图像检测技术有以下优点:1)替代人力减少成本。2)提高产品质量。3)提高生产效率。 本文主要针对在流水线上的集成块容易发生管脚丢失和姿态倾斜的问题,实现对流水线上的集成块的管脚以及对集成块姿态的自动检测。
l 预处理
把图像变成标准图像的过程就是图像预处理。本文中所处理的图像都是在集成块流水线上方的工业摄像机所拍下的图像,图像信号由于输入A/D转换器件及周围环境的影响,含有各种各样的噪声和失真,为了稳定地进行后期检测等工作,必须通过图像预处理以消除噪声、校正失真,达到改善图像质量、便于图像测量的目的。
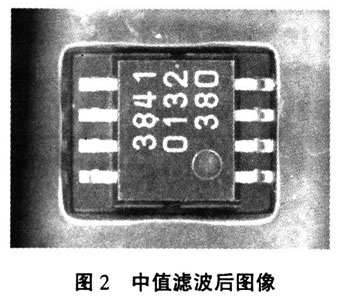
1.1 中值滤波
中值滤波主要目的是去除图像中的椒盐噪声。本文所研究的对像集成块有较多椒盐噪声,所以采取中值滤波实现图像的优化。
1.2 图像阈值分割
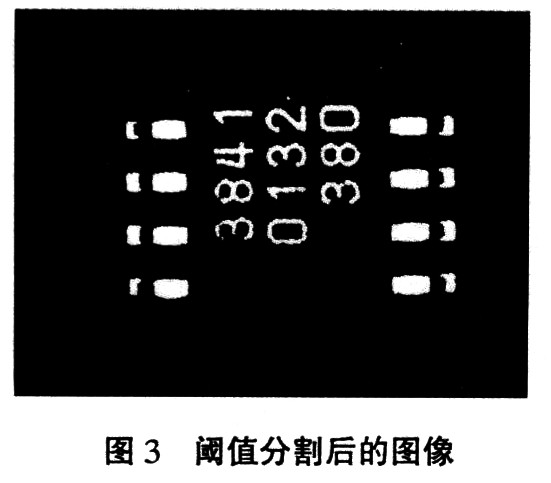
中值滤波后的图像达到了较好的去噪目的,再进行阈值分割处理。图像阈值分割是一种广泛使用的基于空间域聚类分析的图像分割技术,它主要是利用图像中要提取的目标和背景在灰度特性上的差异,选择一合适的阈值,通过判断图像中的每一个像素点的特征属性是否满足阈值要求来确定图像中该像素点属于目标还是应该属于背景,从而产生相应的二值图像。由于本系统是在高速运转的流水线上工作,要求有很高的实时性,所以采取了两种动态阈值分割方法,即类间方差阈值分割和最大熵阈值分割来实现图像的分割,这两种方法是利用目标图像的直方图具有典型的双峰特性,利用概率论和最大熵的理论,自动确定一个最佳的阈值,对图像进行二值化,在本文中的对象经过中值滤波后得到的图像的直方图就满足双峰特性,所以采取上述两种方法对图像进行处理,得到二值化图像。
2 集成块姿态检测
2.1 集成块管脚检测和定位
对图像进行预处理后,可以清晰的看到管脚和集成块上的数字被从背景中分割出来。集成块管脚是一片连通的白色区域,而其所占的面积要比其他无用信息所占的面积要大的多,故采取面积法对集成块管脚位置进行检测。
二值图像中的连通分量的面积实际上就是连通像素点集中像素的个数,也就是区域边界类包含像素点的数目。设二值图像f(x,y)的连通分量ψ(x,y)的大小为M×N,其中
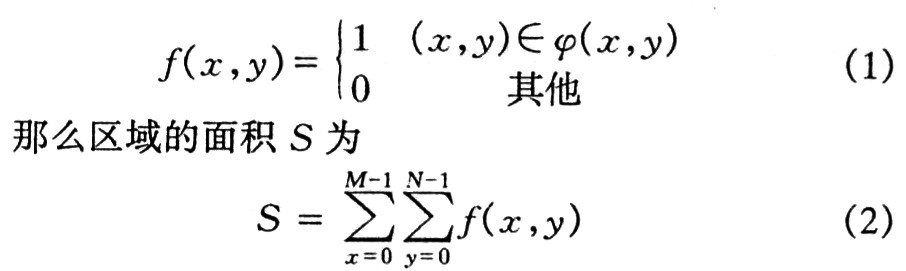
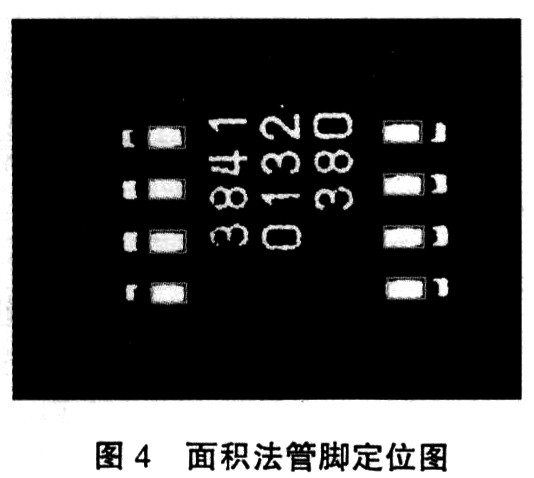
面积法是通过编写程序在整幅图像中搜索白色区域,同时记下白色区域的面积(像素点个数)和个数及其四个边角的坐标。将所统计到的面积相加,除以白色区域的个数,即可得到一个阈值,由于集成块管脚所占的面积要比其他无用信息所占的面积要大的多,所以面积平均所得到的阈值可以将较小的区域去除,从而保留有用的集成块的管脚信息。将大于这一阈值的面积区域用其四个边角的坐标连线所成的矩形框定,便可以完成集成块的管脚定位。
处理过后的效果如图4所示,图中的红色方框的作用为定位管脚位置。
2.2 集成块倾斜角度的测定
在工业应用中,为了能让机械臂很好的将集成块从流水线上夹取下来,必须知道集成块的边缘是否与流水线平行,或知道其倾斜的角度对其进行姿态纠正,这就需要对集成块在流水线上的姿态进行检测,知道集成块在流水线上的与水平方向的倾斜角度,确定一个物体的倾斜角度。本文的创新在于使用了中心点斜率法。
中心点斜率法:假设图像中集成块每个管脚的中心点的坐标为{(xl,y1),(x2,y2),…,(x8,y8)},计算每一个管脚与其同边管脚的斜率{ll,l2,…,ln},再对所有的斜率求其算术平均值
这时得到的是弧度,要把它转化为角度
ω就是集成块的倾斜角度。
由于中心点斜率法将同边管脚两两之间的斜率都计算入内,故精确度较高,但程序复杂,计算量较大,程序运行时间长,不适合在高速的流水线上使用。针对这一情况,提出了对中心点斜率法的改进算法。
改进算法与原先算法的最主要的区别是改进后的算法并不是将所有同边管脚两两之间的斜率都算出来,而是先确定一点,记为{x0,y0},以这一点为基础,计算它与其他管脚的斜率

如果是同一边管脚的话,他们之间的斜率几近相等。反之,则斜率相差很大。因此,通过对斜率的比较,便可以将同边管脚划分在一起,这时只有三个斜率值,再对它们的斜率进行算术平均,同原算法便可