基于GPRS的远程称重数据采集系统
1 引言
随着数据采集及其应用技术的发展和广泛应用,称重数据采集系统也趋于高精度、高速度、稳定可靠和集成化方向发展。目前,大多数称重系统都是独立的,只能用于现场数据采集和存储,这对使用仪表较多的企业不利于集中化管理。因此,迫切需要网络远程管理和监控。这里提出了一种基于GPRS的远程称重数据采集系统,该系统利用称重仪表嵌入的GPRS通信模块,将仪表采集的重量数据通过无线方式接入Interact,实现远程监控。该系统非常适用于工矿企业称重设备的集中化管理和维护。
2 系统整体方案
通用无线分组业务(General Packet Radio Service,简称GPRS)是一种基于GSM系统的无线分组交换技术,可为GSM用户提供分组形式的数据业务。其理论带宽可达1712 Kbit,实际应用带宽约40~100 Kbit,信道可以提供TCP/IP连接,用于Interact连接和数据传输。GPRS永远在线,按流量计费,可提供一种高效、低成本的无线分组数据业务,特别适用于间断的、突发性、频繁的、点多分散、中小流量的数据传输。通过中国移动的GPRS网络系统将现场仪表(采集单元)的数据实时传递到监控中心,实现对现场设备的统一监控和分布式管理。
GPRS无线网络数据传输系统结构如图l所示,带GPRS功能的称重仪表将数据整理,经协议封装后,通过RS232串口发送到嵌入式GPRS模块,GPRS模块对数据TCP/IP打包,再将数据发送到中国移动的GPRS数据网络,再通过GPRS数据网络将数据传送至Interact,监控中心计算机还原数据包所需的数据结果,实现仪表数据和监控中心系统的实时在线连接。
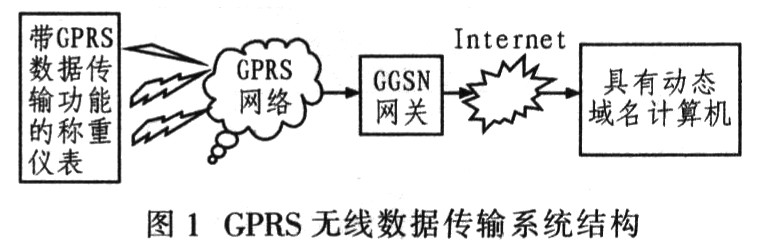
在GPRS无线通讯中,作为用户数据传输目的地的数据中心计算机在Intemet需要使用固定IP,由于国内固定IP数量有限,所以多数使用动态域名作为数据中心计算机的IP地址。对于动态域名,需要通过域名服务器将动态域名解析成数据中心计算机的IP地址。因此,如果没有固定IP地址,则必须用动态域名解析计算机IP地址的方法来实现。
3 硬件电路设计
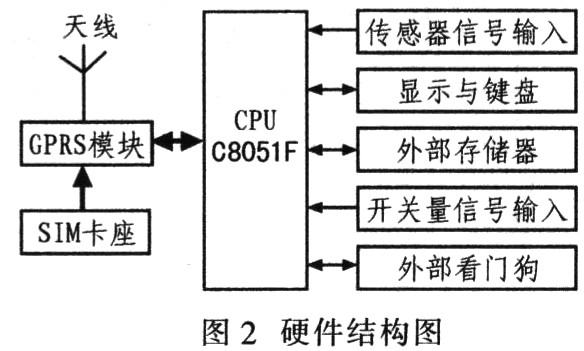
图2为系统设计的硬件电路结构图。将GPRS模块(带有SIM卡)固定在仪表内,并与单片机相连,单片机使用AT命令通过RS232接口与GPRS模块通信。其工作原理:通过RS232接口接收单片机串口数据,然后将数据打包成IP包,由GPRS模块接入GPRS网络,由各种网关和路由将数据发送到数据管理中心。
3.1 微处理器
3.2 外部信号采集和看门狗电路
由于称重仪表需具有高精度,这里采用外接A/D转换器采集电路,选用CS5532器件。该器件是一款具有极低噪音、多通道型A/D转换器。CS5532采用电荷平衡技术和极低噪声的可编程增益斩波稳定测量放大器,可得到高达24位分辨率的输出结果,精度高,动态特性宽,是其他同类A/D转换器所无法比拟的。外部信号采集电路如图3所示。

为了提高仪表的抗干扰能力,增强仪表的稳定性,采用外部看门狗复位电路,故选用FN33256,该器件具有电源及看门狗低有效复位输出;可编程低电压复位门限;手动复位输入;可编程看门狗计数器;256 K字节的非易失性存储器用于存储仪表参数;电池供电。看门狗复位电路如图4所示。

3.3 GPRS无线模块
GPRS无线模块选用SIEMENS公司的MC55,该器件主要特点:尺寸紧凑(35 mmx32.5 mmx2.95 mm),仅重5.5 g;双三频工作模式:900 MHz,1 800 MHz和1 900 MHz(MC55);850MHz,l 800 MHz和1 900 MHz(MC56);语音和数据传输功能;GPRS标准.支持PBCCH;勾嵌TCP/IP协议栈。该模块性能稳定、可靠、操作方便,其电路如图5所示。

整个系统首先必须让MC55上电,上电是由MC55的IGT引脚电平控制.其输出电平由软件设置。IGT引脚接单片机的P1.0口,EMERGOFF引脚PO.0。需要注意的是:单片机上电引脚输出高电平,MC55的EMERGOFF引脚被拉低,导致无法上电,所以上电后需设置P0.0引脚输出低电平。
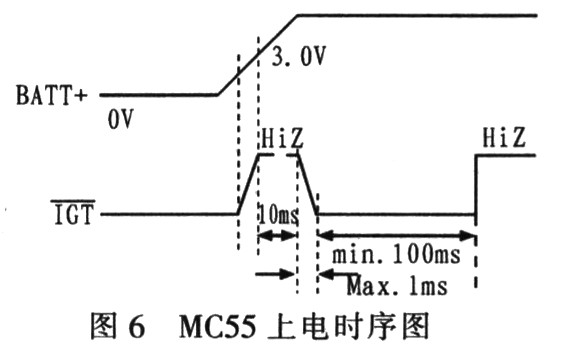
为了接通MC55,IGT引脚信号保持低电平至少100 ms,且比VDD引脚的下降沿延迟至少10 ms如图6。这样开漏驱动可避免电流流人该引脚。如果配置固定波特率,MC55发送SYNC以指示模块上电完毕。而当配置在自动波特率时,则无该指示。MC55上电步骤如下:IGT引脚当UBATT+超过3 V时才操作;IGT引脚要比VDD的下降沿至少延迟10 ms后才开始操作;URATT+超过3 V并保持10 ms后,IGT变为低电平,且下降沿的持续时间不能超过l ms;启动模块还需额外100 ms;确保驱动IGT时UBATT+不低于3 V;如果VDDLP引脚是外部电源供电,IGT引脚在UBATT+的上升沿之前已是HiZ。
4 系统软件设计
4.1 RTX51及部分程序
当处理、调度多个任务,选用嵌入式实时操作系统是最佳方案。因此该系统采用RTX51 Tiny
- 采用软件无线电架构加速无线设备开发和测试(03-12)
- 基于嵌入式Windows CE5.0的无线监控系统研究(03-26)
- 基于GPRS的配变监控系统的设计与实现(06-18)
- 基于GPRS传输的输电线路红外测温系统(07-09)
- 如何进行2.5G/3G核心网络测试(01-24)
- 关于GPRS技术的远程智能抄表系统的研究(01-28)