MEMS运动处理方案对消费类电子的影响分析
对设备在三维空间中的运动进行测量及智能处理的运动处理技术,将是下一个重大的革命性技术,会对未来的手持消费电子设备、人机接口、及导航和控制产生重大影响。
这场变革的推动力量是基于微机电系统(MEMS)的消费级惯性测量单元(IMU)。与六轴运动处理技术相结合,这些器件可为手持消费电子产品的导航和控制提供更简单并符合直觉的用户接口,从而解决这些复杂设备使很多用户感到困惑的操作复杂性问题。
这种基于MEMS运动处理的六轴控制得以实现的关键器件是最近推出的体积更小、成本更低、性能更高、可与现有的三轴MEMS加速度计相结合三轴MEMS陀螺仪。
本文将给出一个六轴运动处理方案,并探讨把这种技术整合到日用消费电子系统中时需要考虑的关键问题。在使用六轴运动处理实现新的设计时,确保符合本文给出的四个关键因素可提高整合效率,并使最终的用户设备具有卓越的性能。
运动处理应用
在电子娱乐展览会(E3)上,三大游戏机品牌都展示了为其当前或下一代系统开发的运动驱动型人机接口,其中,任天堂率先宣布在Wii MotionPlus的配件中包含六轴运动处理方案。一些游戏软件开发商迅速推出了可利用六轴运动处理功能的新游戏:任天堂将在2009年7月推出Wii Sports游戏的续篇Wii Sports Resort。早期的产品评估显示,使用运动处理技术实现的屏幕游戏控制对控制器运动有较高的跟踪精度,并实现了1:1跟踪。
由于消费者已接受了三轴加速度计所提供的新特性,手机将是运动处理的下一个前沿领域。苹果公司的iPhone就是一个很好的例子。目前,苹果在继续开发独 特的运动传感应用,包括为其iPhone3.0增加在复制和粘贴过程中通过晃动撤消操作的shake-to-undo(晃动撤消)功能等。向未来的手机和 其它手持消费电子系统增加六轴运动处理可以以更高的精度、准确度和反应能力向软件开发商提供手机在三维空间的绝对位置,进而使之具有控制台游戏性能。
这是一个快速变化的环境,在过去,带有传统的按钮和滑轮的产品率先上市曾经是设计取胜的关键;而今,成功将取决于谁可以创造出最有吸引力的用户体验,因为依靠六轴运动处理,复杂的控制和导航指令现在可用普通的手势动作来执行。
运动处理方案
提供运动处理能力的关键技术,就是传统上用于测量绝对旋转速率的陀螺仪。振动质量陀螺仪利用科氏加速度在一个结构的两个共振模式之间产生的能量传递,科氏加速度出现在旋转参照坐标系中,并与旋转角速度成正比,参见图1。陀螺仪通过测量科氏加速度来获得角速度(Ω)。
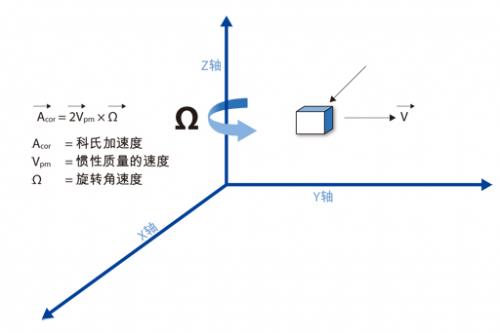
图1:科氏加速度出现在旋转参照平面中,与旋转速率成正比。
振动调谐音叉质量陀螺仪通常包含一对振幅相等、方向相反的振动质量块。当陀螺仪旋转时,科氏力引起与旋转角速度成正比的正交振动力。好的陀螺仪设计应具有 较高的科氏加速度和较低的机械噪声。要获得较大的科氏加速度要求惯性质量具有较高的速度(这个速度是在静电力驱动下产生的),要获得高灵敏度要求集成电路 (IC)放大倍数较低以降低噪声。
虽然加速度计可为简单的方位和倾斜应用提供基本的运动传感,但在光学图像稳定(OIS)等更复杂的应用中,却存在一些影响加速度计操作和性能的限制。加速 度计只能提供线性和向心加速度、重力和振动的总和。需要增加陀螺仪才能提取加速度的线性运动信息的某个分量。在运动处理方案中,陀螺仪必须精确地测量角速 度旋转运动。
为校正加速度计的旋转误差,一些厂商使用磁力计来完成传统上用陀螺仪实现的传感功能。这些器件确定手持设备相对于磁北方向的旋转运动,并通常用于调整地图 的显示方向以使之与用户当前面对的方向相对应。磁力计无力实现快速旋转测量(大于5赫兹),而且,在存在外部磁场时(如存在扬声器、音频耳机),甚至当设 备周围存在铁磁材料时,数据易于受到污染。陀螺仪是唯一提供准确、无延迟的旋转测量,且不受磁、重力或其他环境因素的任何外力影响的惯性传感器。
基于硅MEMS的技术不但带来了可满足消费电子产品成本要求的新型MEMS陀螺仪,而且有望达到具有挑战性的每轴低于$1.00美元的行业成本目标,另 外,这种新型陀螺仪也满足手机、游戏控制器、遥控器和便携导航设备对封装尺寸和旋转传感精度的要求。体积小、性能高、成本低的MEMS陀螺仪及其配套的 MEMS加速度计已经使运动处理方案成为现实。
既需要陀螺仪,也需要加速度计
要满足最终用户的功能预期,需要获得三轴旋转运动和三轴直线运动的信息。一个常见的误解是,要使手持系统具有运动处理功能,工程师需要加入陀螺仪或加速度计,即只需二选一。确实,已经有业界分析师提出这样的问题,"哪一个将在运动传感器竞赛中获胜?"
- 蜂窝手机音频架构的未来发展趋势(02-16)
- 如何利用MEMS麦克风改善移动设备声学性能(06-19)
- 闪耀光栅数字微镜的结构设计与驱动(05-25)
- 解析Microvision单镜面MEMS芯片技术(01-05)
- MEMS加速度传感器五大功能简化用户设计(10-02)
- MEMS陀螺仪和加速度计为广泛应用带来更酷的新功能(11-20)