基于TMS320F2812的太阳跟踪器系统设计
引言
太阳能是一种无污染、无噪声、无公害的可再生能源,目前开发利用太阳能的方式很多,光伏发电是其中一种主要的利用方式。所谓光伏,是以太阳能电池为媒介,将太阳光直接转化为电能的过程。我国目前采用的光伏发电电池以普通单晶硅多晶硅为主,转换效率较低;聚光电池转换效率较高,但需要跟踪精度较高的太阳跟踪器,时时刻刻跟踪太阳,使太阳光线与集光板垂直,利用图1所示的菲涅耳透镜使光线汇聚在聚光器的聚光电池上,提高能量密度,从而提高发电效率。

1 太阳跟踪器跟踪原理
目前国内外的太阳跟踪器按跟踪原理分为:传感器检测的主动跟踪原理和太阳位置计算的被动跟踪原理。本文将两种原理相结合设计了基于TI公司的DSP芯片TMS320F2812的太阳跟踪控制器。
1.1 传感器检测的原理
利用硅光电池的光电效应,在太阳能集光板上高度和方位方向各放置两个长方形的硅光电池板,阳光通过通光筒照射在硅光电池板上,如图2所示。

高度方向硅光电池被分为A、B两个区域,方位方向硅光电池被分为C、D两个区域。通过电压比较电路可分别计算出它们之间的电压差: 
其中,UA、UB、UC、UD为A、B、C、D各点的电压,K为标定系数,由此可在一定范围内检测角度偏差,从而确定运动方向和角度变化大小。
1.2 太阳位置计算的原理
太阳在天球上的位置可由太阳高度角和太阳方位角来确定。地球上观测点同太阳中心连线与地平面的夹角,称为太阳高度角;地球上观测点同太阳中心连线在地平面上的投影与正南方向之间的夹角,称为太阳方位角。太阳运行轨迹与太阳高度角α、方位角γ的关系如图3所示。
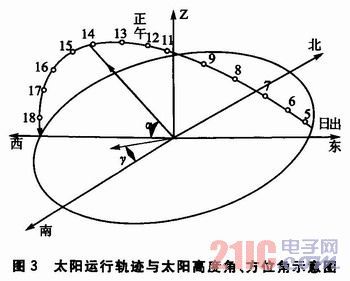
要计算α和γ,可以采用以下计算方法:

δ为太阳赤位角,ω为太阳时角,φ为当地的纬度。对于δ和ω这两个参数的精确计算要满足高精度跟踪的需求,并根据实际情况来不断修正;同时,还需要结合传感器检测的原理加以修正。采用TMS320F2812做主处理器,根据硬件时钟提供的日历时间计算出太阳的高度角和方位角,进而控制电机转动方向和角度,由传动机构带动支架转动精确地跟踪太阳。
2 跟踪器体系结构设计
根据上述工作原理,本设计以太阳位置计算的方法为主要跟踪方式,采用硅光电池传感器进行角度偏差反馈,设计了高精度太阳跟踪器。
2.1 主要控制电路硬件设计
硬件结构框图如图4所示。选用TI公司32位定点数字信号处理器TMS320F2812和Altera公司的CPLDEPM3256为主协处理器。由DSP完成计算与控制算法,并产生用于步进电机控制的SPWM波;输入/输出接口采用光电隔离;驱动器电路选择IPM模块,可以达到功率驱动的目的,进而驱动高度和方位步进电机运转。CPLD实现实时显示、扫描键盘、接收扩展中断等功能。二者通过DSP的外部接口(XINTF)进行通信。采用光电开关和限位开关分别实现定位、限位功能,提高了系统的稳定性和可靠性。采用LCD显示和5×5矩阵键盘,方便进行人机交互的临时调整操作。
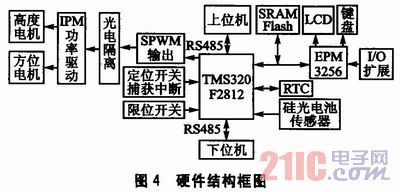
首先利用光电定位开关和硅光电池传感器进行初始对准,通过TMS320F2812的SPI总线设置硬件时钟RTC初值后,利用硬件时钟实时读取时间并计算太阳高度、方位角。在设定的工作时间内,依据计算的太阳高度、方位角选择合适的运行时间和运行速度,计算步进电机应该转的步数和控制板应该发的脉冲数。由 EV事件管理器产生SPWM波,经IPM功率驱动后,驱动高度和方位方向步进电机转动,经机械传动带动太阳能集光器支架转动适当角度,实现自动跟踪。每天工作完以后自动返回归位,若出现较大位置偏差,可以由光电开关和硅光电池传感器进行修正。修正完毕重新进入自动跟踪,工作完成后自动返回。
2.2 主要控制软件设计
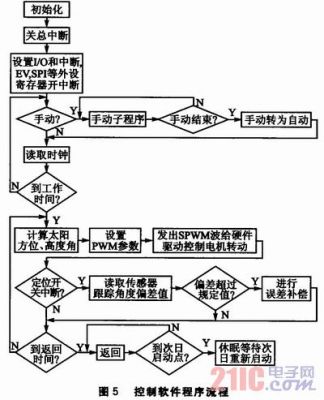
系统在正常工作时,每天从定位开关处开始自动运行,晚上返回定位开关处。启动和返回时间由太阳高度决定。在完成一周期(即一天)的跟踪后由时钟电路的定时中断信号进入休眠状态,或定时由继电器关闭总电源,减小系统功耗,待次日由定时中断信号或值班电路给出信号唤醒处理器进入下一周期工作。控制软件程序流程如图5所示。
3 实际效果与误差分析
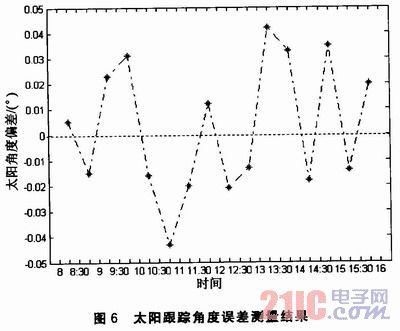
将设计的太阳跟踪器应用在太阳能发电中。从2010年4月某天早上8:00工作至下午17:00,典型误差测量结果如图6所示。由于机械结构和传动机构等的误差,以及外界不确定环境(如大风等)的影响,跟踪角度存在无规律性误差,但总体来说误差可以控制在±O.05°之内。
实践运行情况表明,太阳跟踪器实现了高精度跟踪,年平均发电量比固定式高了20%~40%,比普通单轴式高出约25%。可见,该设计方案能够使光伏发电效率大大提
TMS320F2812 太阳跟踪器 CPLDEPM3256 相关文章:
- 汽车内部噪声智能控制系统设计(05-24)