基于CAN/LIN总线的汽车通信网络设计
时间:08-18
来源:作者:刘晓明 高青春 熊东
点击:
统等。L IN 总线用于A 类系统,最高传输速率可达20kbps。其控制对象主要为:前后车灯控制开关、电动座椅开关、中央门锁与防盗控制开关、后视镜、空调、车窗控制开关等。这些控制对象对信息传输的实时性要求不高,但数量较多。采用L IN 总线可提高抗干扰能力、增加总线传输距离、降低成本。以门窗控制为例,在车门上有门锁、车窗玻璃开关、车窗升降电机、操作按钮等,只需一个L IN 网络就可以实现。
CAN 总线和L IN 总线相互独立,通过中央控制器实现资源共享并进行数据交换。中央控制器是整车管理系统的核心,它同时也是CAN 总线和L IN 总线的网关服务器,它的主要功能就是对各种信息进行分析处理并发出指令,协调汽车各控制单元及电器设备的工作。
接口设计
整车通信网络是由许多CAN 节点和L IN 节点通过CAN 总线和L IN 总线连接组成的一个局域网,因此接口设计十分重要。
图3 为中央控制器与CAN 总线、L IN 总线接口设计。中央控制器内包括了一个CAN 的控制器和一个SCI 接口。CAN 智能节点一般由MCU ,CAN 控制器和CAN 收发器组成。
L IN 节点选择了FREESC2AL E 的器件。其中L IN 节点收发器采用MC33399 ; L IN 节点MCU 选择MC68HC805 PV8 。由于汽车上的电磁干扰较大,为提高系统的抗干扰能力,在CAN 控制器和CAN 收发器以及L IN 控制器和L IN 收发器之间增加了由6N137 构成的光电隔离电路。
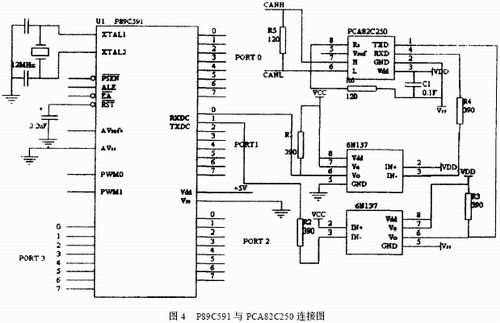
CAN 智能节点选择PHIL IPS 器件: PCA82C250 作为CAN 收发器; CAN 节点的MCU 选用P89C591 , 因P89C591 内部集成有CAN 控制器(有PeliCAN 接口) ,所以没有再选择CAN 控制器,其连接图如图4 所示。设计人员也可以选用微控制器+ 外接CAN 控制器这样的连接法。
总结
基于CAN 总线A 类车身控制在汽车上已有广泛应用。随着车上总线节点的增加及高性能系统向中、低档汽车的发展,CAN 总线相对较高的实现成本就成为一种障碍。与CAN 相比,L IN 节点的通信成本是CAN 的1/ 3~1/ 2 ,具有较明显的成本优势。文中的汽车通信网络将L IN 应用于车身系统,既实现了应有的网络控制功能,又降低了开发、生产、服务的成本,具有较高的实用性。
CAN 总线和L IN 总线相互独立,通过中央控制器实现资源共享并进行数据交换。中央控制器是整车管理系统的核心,它同时也是CAN 总线和L IN 总线的网关服务器,它的主要功能就是对各种信息进行分析处理并发出指令,协调汽车各控制单元及电器设备的工作。
接口设计
整车通信网络是由许多CAN 节点和L IN 节点通过CAN 总线和L IN 总线连接组成的一个局域网,因此接口设计十分重要。
图3 为中央控制器与CAN 总线、L IN 总线接口设计。中央控制器内包括了一个CAN 的控制器和一个SCI 接口。CAN 智能节点一般由MCU ,CAN 控制器和CAN 收发器组成。
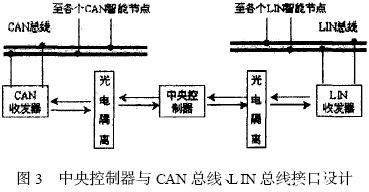
L IN 节点选择了FREESC2AL E 的器件。其中L IN 节点收发器采用MC33399 ; L IN 节点MCU 选择MC68HC805 PV8 。由于汽车上的电磁干扰较大,为提高系统的抗干扰能力,在CAN 控制器和CAN 收发器以及L IN 控制器和L IN 收发器之间增加了由6N137 构成的光电隔离电路。
CAN 智能节点选择PHIL IPS 器件: PCA82C250 作为CAN 收发器; CAN 节点的MCU 选用P89C591 , 因P89C591 内部集成有CAN 控制器(有PeliCAN 接口) ,所以没有再选择CAN 控制器,其连接图如图4 所示。设计人员也可以选用微控制器+ 外接CAN 控制器这样的连接法。
总结
基于CAN 总线A 类车身控制在汽车上已有广泛应用。随着车上总线节点的增加及高性能系统向中、低档汽车的发展,CAN 总线相对较高的实现成本就成为一种障碍。与CAN 相比,L IN 节点的通信成本是CAN 的1/ 3~1/ 2 ,具有较明显的成本优势。文中的汽车通信网络将L IN 应用于车身系统,既实现了应有的网络控制功能,又降低了开发、生产、服务的成本,具有较高的实用性。
- CAN在汽车电子中的应用(11-18)
- CANopen验证—如何让你的设备按照既定设计运行(11-26)
- LIN和SAE J2602驱动更为有效的汽车网络连接(上)(11-26)
- 汽车总线协议的形势判断(11-26)
- 基于ADG663的CAN总线网络扩展方案设计(11-27)
- 基于CAN总线的电动汽车实验平台 (11-27)