基于CAN总线重型汽车内轮差预警系统的设计
时间:05-16
来源:作者:石斌
点击:
3.2 超声波传感器介绍
本系统采用单片机AT89C51来实现对SensComp 600系列超声波传感器和SensComp 6500超声波测距模块的控制。SensComp 600系列静电换能器的频率为50kHz;测量范围为6英寸到35英尺(0.15米~10.7米)。配合SensComp的6500驱动电路时传感器测量范围能从2.5厘米到15.2米。AT89C51通过P1.0引脚控制超声波的发送,然后单片机不停的检测INT0引脚,当INT0引脚的电平由低电平变为高电平时就认为超声波已经返回。计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离,如图3所示为超声波测距的硬件示意图。
3.3 温度补偿设计
由于温度每改变10℃,声速改变量为0.6m/s,因此温度对测距的影响是相当大的。为了更精确的实现检测功能,本设计使用了美国DALLAS半导体公司的单线温度传感器DS18B20。该传感器能够直接读出被测温度并且可根据实际要求通过简单的编程实现9~12位的数字值读数方式,测温范围 -55℃~+125℃,精度达±0.5℃,现场温度直接以"一线总线"的数字方式传输,大大提高了系统的抗干扰性,整个产品体积小、价格低、使用灵活,在测温精度、转换时间、传输距离、分辨率等方面都能够满足系统的要求。如图4为温度传感器与单片机的连接原理图。
4 系统软件设计
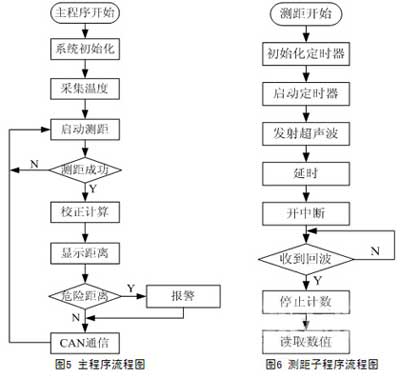
软件采用模块化设计,程序由主程序、测距子程序、CAN总线通信子程序等模块组成。调试过程中对其中每个功能模块和子程序逐一调试,在每个子程序都完成其指定的功能后,再进行整合完成最后的综合调试。轮差预警系统的主程序流程图、测距子程序流程图分别如图5、6所示。汽车转弯时启动预警系统,AT89C51先把P1.0置0,启动超声波传感器发射超声波,同时启动内部定时器T0开始计时。我们采用的超声波传感器是收发一体的,在发送完16 个脉冲后超声波传感器还有余震,为了从返回信号识别消除超声波传感器的发送信号,要检测返回信号必须在启动发射信号后2.38ms才可以检测。当超声波信号碰到障碍物时信号立刻返回,微处理器不停的扫描INT0引脚,如果INT0接收的信号由低电平变为高电平,此时表明信号已经返回,微处理器进入中断关闭定时器。再把定时器中的数据结合温度传感器送来的现场温度经过校正换算,可以得出超声波传感器与障碍物之间的真实距离;然后显示测距结果,若测距结果低于设定阀值则产生报警信号;最后把得到的距离数据实时的通过CAN总线网络向汽车主控制器发送,这样就可以实现预警系统与CAN网络其他节点和上位机的通信和网络控制功能。
本文提出了一种应用于重型汽车的轮差预警系统,基于超声脉冲测距原理进行测距,根据现场温度对数据进行校正,并通过CAN总线将轮差预警系统与汽车的数字化平台接轨,降低了环境因素的影响,提高了系统的检测精度。根据障碍物到车体的距离远近进行实时显示,当该计算距离小于安全距离时,可以进行预警,提醒司机采取必要措施以避免发生碰撞事故。本系统结构简单、可靠性高,可以经济、有效地降低大型汽车轮差事故发生率,具有很好的应用前景。
参考文献
[1] 黄世霖等. 汽车碰撞与安全[M]. 北京: 清华大学出版社, 2000.
[2] 何希才.传感器及其应用电路[M] . 电子工业出版社, 2001.
[3] 邬宽明. CAN总线原理和应用系统设计[M]. 北京: 北京航空航天大学出版社, 1996.
[4] 阳宪惠. 现场总线技术及应用[M]. 北京: 清华大学出版社, 1999.
[5] 王绍銧, 夏群生, 李建秋等. 汽车电子学[M]. 北京: 清华大学出版社, 2005.
[6] 黄世霖, 张金换, 王晓冬等. 汽车碰撞与安全[M]. 北京: 清华大学出版社, 2000.
本系统采用单片机AT89C51来实现对SensComp 600系列超声波传感器和SensComp 6500超声波测距模块的控制。SensComp 600系列静电换能器的频率为50kHz;测量范围为6英寸到35英尺(0.15米~10.7米)。配合SensComp的6500驱动电路时传感器测量范围能从2.5厘米到15.2米。AT89C51通过P1.0引脚控制超声波的发送,然后单片机不停的检测INT0引脚,当INT0引脚的电平由低电平变为高电平时就认为超声波已经返回。计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离,如图3所示为超声波测距的硬件示意图。
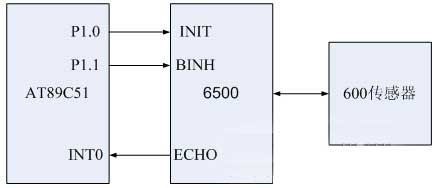
图3 超声波测距电路的硬件示意图
3.3 温度补偿设计
由于温度每改变10℃,声速改变量为0.6m/s,因此温度对测距的影响是相当大的。为了更精确的实现检测功能,本设计使用了美国DALLAS半导体公司的单线温度传感器DS18B20。该传感器能够直接读出被测温度并且可根据实际要求通过简单的编程实现9~12位的数字值读数方式,测温范围 -55℃~+125℃,精度达±0.5℃,现场温度直接以"一线总线"的数字方式传输,大大提高了系统的抗干扰性,整个产品体积小、价格低、使用灵活,在测温精度、转换时间、传输距离、分辨率等方面都能够满足系统的要求。如图4为温度传感器与单片机的连接原理图。
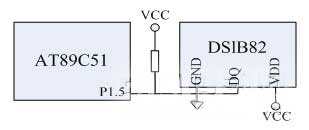
图4 温度校正部分原理图
4 系统软件设计
软件采用模块化设计,程序由主程序、测距子程序、CAN总线通信子程序等模块组成。调试过程中对其中每个功能模块和子程序逐一调试,在每个子程序都完成其指定的功能后,再进行整合完成最后的综合调试。轮差预警系统的主程序流程图、测距子程序流程图分别如图5、6所示。汽车转弯时启动预警系统,AT89C51先把P1.0置0,启动超声波传感器发射超声波,同时启动内部定时器T0开始计时。我们采用的超声波传感器是收发一体的,在发送完16 个脉冲后超声波传感器还有余震,为了从返回信号识别消除超声波传感器的发送信号,要检测返回信号必须在启动发射信号后2.38ms才可以检测。当超声波信号碰到障碍物时信号立刻返回,微处理器不停的扫描INT0引脚,如果INT0接收的信号由低电平变为高电平,此时表明信号已经返回,微处理器进入中断关闭定时器。再把定时器中的数据结合温度传感器送来的现场温度经过校正换算,可以得出超声波传感器与障碍物之间的真实距离;然后显示测距结果,若测距结果低于设定阀值则产生报警信号;最后把得到的距离数据实时的通过CAN总线网络向汽车主控制器发送,这样就可以实现预警系统与CAN网络其他节点和上位机的通信和网络控制功能。
本文提出了一种应用于重型汽车的轮差预警系统,基于超声脉冲测距原理进行测距,根据现场温度对数据进行校正,并通过CAN总线将轮差预警系统与汽车的数字化平台接轨,降低了环境因素的影响,提高了系统的检测精度。根据障碍物到车体的距离远近进行实时显示,当该计算距离小于安全距离时,可以进行预警,提醒司机采取必要措施以避免发生碰撞事故。本系统结构简单、可靠性高,可以经济、有效地降低大型汽车轮差事故发生率,具有很好的应用前景。
参考文献
[1] 黄世霖等. 汽车碰撞与安全[M]. 北京: 清华大学出版社, 2000.
[2] 何希才.传感器及其应用电路[M] . 电子工业出版社, 2001.
[3] 邬宽明. CAN总线原理和应用系统设计[M]. 北京: 北京航空航天大学出版社, 1996.
[4] 阳宪惠. 现场总线技术及应用[M]. 北京: 清华大学出版社, 1999.
[5] 王绍銧, 夏群生, 李建秋等. 汽车电子学[M]. 北京: 清华大学出版社, 2005.
[6] 黄世霖, 张金换, 王晓冬等. 汽车碰撞与安全[M]. 北京: 清华大学出版社, 2000.
- 浅谈数据线扼流圈改善电磁兼容问题使汽车更加安全(06-23)
- CAN总线技术在汽车车身控制中的应用(03-28)
- 汽车电子须知 汽车网线与CAN总线的标准(04-17)
- 利用CAN总线的进行汽车轮速传感器设计(06-27)
- 浅谈汽车车载网络的应用(07-07)
- CAN总线在汽车车身控制中的应用(07-30)