基于ARM和滑动指纹传感器的采集系统
4、 系统定制和驱动程序加载
4.1 系统定制
为了增加系统的可维护性,采用Linux系统,Linux内核可根据需要裁减。系统定制过程为:(1) 首先将RomBoot.bin下载到AT91RM9200的SDRAM里;当超级终端显示RomBoot程序界面之后,分别将RomBoot.bin和U-Boot.bin程序下载存储到DataFlash的0xc0000000和0xc0008000地址。复位开发板,进入U-Boot命令行。(2)在超级终端中,通过tftp将裁减过的Linux内核镜像文件和文件系统下载到Dataflash中运行。
4.2 加载驱动程序
设备驱动程序在Linux内核中,使某个特定的硬件响应一个定义良好的内部编程接口,同时完全隐藏了设备的工作细节。用户通过一组标准化的调用完成对硬件的操作,而这些调用是和特定的驱动程序无关的。将这些调用映射到作用了实际硬件的设备特定的操作上,就是设备驱动程序的任务。另一方面,这种编程接口使得驱动程序独立于内核的其他部分而建立,在需要的时候,可以在运行时"插入"内核(调入内存),也即Linux中的模块化实现,这也是Linux中设备驱动程序的一大特点。
将FingerChip驱动程序加载到Linux文件系统中,当系统运行时,使用insmod命令,即可实现指纹传感器设备的装载。通过标准化的调用,实现对传感器的控制。
5、基于滑动式指纹传感器的指纹拼接算法
当手指滑过时,滑动指纹传感器采集到是一系列指纹帧序列,因此在嵌入式系统中,需要对获取的指纹帧序列进行拼接。与PC机中的CPU相比,ARM芯片速度较低。为了减少刮取指纹后的等待时间,对指纹拼接速度的要求很高。
从大量的指纹序列中发现,当采集速度足够快时,指纹帧序列相邻两帧之间是连续的,而且会有部分重叠。同时,相邻指纹帧之间的旋转和形变微乎其微,几乎可以被忽略,所以在相邻指纹帧配准的时候,只需要计算出两帧之间的偏移量就可以。
本文运用基于块匹配指纹拼接算法[5],能够快速有效的寻找到相邻指纹帧之间的偏移量。块匹配算法是:(1)在图像A中选取M×N大小的X区域;(2)在图像B中选取所有可能的M×N大小的Y区域;(3)计算X区域和Y区域对应象素差值的平均值MAE;MAE越小,两区域相似度越高;(4)MAE最小值对应的Y区域即为与X区域匹配。计算公式为: 
其中0≤i≤M-1,0≤j≤N-1,p(i,j)为X区域的点p的象素值,q(i,j)为Y区域对应点q的象素值。MAE越小,两区域相似度越高。理想情况下,MAE最小值为0。
具体实现步骤:(1)FingerChip AT77104A获取到的指纹帧数据大小为232×8,设x方向为232,y方向为8。为了有效的拼接相邻两帧指纹,设置获取每一帧数据的频率,使得y方向的偏移量dy不大于8,即保证相邻两帧一定有重叠。(2)理想情况下,手指在y方向滑动,在x方向上偏移量为0。因此,只考虑dx不大于dy的情况。当dx超过dy时,滑动无效。(3)由(1)(2)可得,|dx|<8。同时可得,最后一行,中间的(232-8×2)个象素与下一帧必有重叠。(4)取前一帧最后一行(232-8×2)个象素,即(232-8×2)×1的模板,与新获取的一帧指纹匹配。(5)匹配方法:在新的指纹帧里面寻找所有可能的(232-8×2)×1的模板,计算求得MAE。选取MAE的最小值对应的模板,此模板与上一帧的最后一行的(232-8×2)×1的模板相匹配。即得dx,dy。(6)重复执行以上步骤,直到得到一幅完整的指纹图像。图3-a为拼接前的指纹帧,图3-b为拼接后的指纹图像。
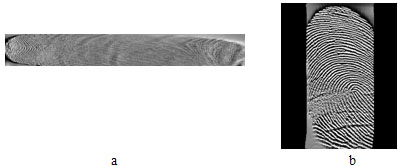
图3 a.拼接前的指纹帧 b.拼接后的指纹图像
6、 总结
本文实现了基于ARM9芯片AT91RM9200和滑动指纹传感器AT77C104B FingerChip的指纹采集系统,具有低功耗,采集便捷,通信系统简单等优点,具有很大的实用价值。开发的指纹拼接算法通过了AT77C104B FingerChip获取的100幅指纹帧序列的测试,均能达到较好的效果。该系统获取到的指纹帧序列和拼接后的指纹图像,均可通过USB接口导出,可用于指纹拼接算法有效性的测试和指纹识别算法的测试。因为AT91RM9200支持以太网的接入,因此可以联网集控。下一步的工作是,在此指纹采集和指纹拼接算法的基础上,开发指纹识别系统。