汽车雷达探头必须解决干扰问题
雷达经常使用多进制频移键控(Multi-Frequency Shift Keying, MFSK) 雷达信号,并且主要工作在24GHz频段。工作在77 GHz或79 GHz频段的雷达经常使用线性调频连续波(Linear Frequency Modulated Continuous Wave, LFMCW) 信号或线性调频序列(Chirp Sequence, CS) 信号,后者是一种特殊形式的LFMCW信号。
使用LFMCW,雷达在一定时间内(称为相干处理间隔TcpI)发射具有特定带宽fsweep的调频信号(线性调频),如图2所示。
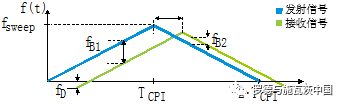
图2:采用上行线性调频和下行线性调频的LFMCW雷达
雷达用瞬时发射频率下变频接收的信号,并测量差频fB, fB描述与原始发射波形的偏移。两个雷达参数,范围R和径向速度Vr,都与测量的差频fB相关。为了无模糊地求解目标Vr和R,必须进行两次差频测量(如图2所示),其中两个差频分别表示为fB1和fB2 。在多目标情况,用不同差频的两组连续线性调频信号,不能无模糊地求解距离和径向速度。这可以通过使用额外的具有不同斜率的线性调频信号来解决。
为了实现一定的径向速度分辨率,TcpI通常在20ms范围内,并且单次处理间隔内线性调频数目大于2。fsweep决定了距离分辨率,fsweep在几百MHz间变化,在不久的将来其变化范围可达1GHz以上,在未来可能是4 GHz甚至5 GHz。
另一种波形称为线性调频序列(CS),它由几个非常短的LFMCW线性调频连续波组成,每个线性调频持续时间为Tchirp ,采用块长度TcpI 发射(参阅图3)。由于单个线性调频非常短,所以差频fB主要受信号传播时间影响,并且多普勒频移fD可以忽略不计。

图3:线性调频序列
在经过用瞬时载波频率初始下变频和对每个线性调频实施傅立叶变换后,信号处理便开始了。由于高载波频率和高线性调频率,差频主要由距离决定。计算目标距离R时,假定径向速度Vr =u/s 在单个线性调频期间不测量径向速度,而是在持续时间为TcpI的连续线性调频块上测量。沿时间轴执行第二次傅立叶变换,得到多普勒频移fD。 在获得多普勒频移之后,便可校正目标距离。
虽然单个Tchirp通常在10μs到100μs范围内,但是信号LN的数量应当高到使得整个相干处理间隔TcpI=LNTchirp再次在几十毫秒的范围内,以实现期望的径向速度分辨率。
信号带宽大,与之相比接收机带宽非常小。由于事实上仅测量雷达设计的最大差频,这是可以实现的。为了给出两个示例,表1显示了当目标径向速度为50m / s、距离在40米范围内时,采用两种汽车雷达波形的差频。
这些计算依据LFMCW方程,并且显示LFMCW的差频在几百kHz范围内,但CS雷达(几MHz)的差频显然高得多。这导致接收机带宽更大,并且与使用LFMCW时所用的技术相比可能需要不同的干扰抑制技术。
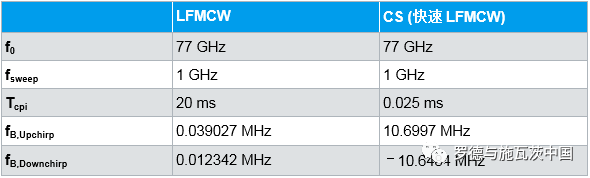
表1:使用LFMCW 和CS信号的77 GHz 雷达,以及目标采用50m/s径向速度且距离在40米范围内的预期差频。
与LFMCW相比,CS的优点是无模糊和提高了更新速率,因为单个相干处理间隔(TcpI) 足以测量和分辨观察范围内的所有目标。在LFMCW中,至少需要3种不同的线性调频信号。另一方面,在CS波形中,由于多次FFTs和接收机带宽要根据预期的差频而缩放,处理复杂度增加,这就是需要干扰抑制和干扰缓解技术的原因。
图4描述了当存在干扰信号(红色线性调频)时的下变频和傅里叶变换过程。干扰线性调频与物体的雷达回波一起下变频。绿色表示某个范围的恒定差频,它会在无干扰环境中测量单个目标时产生。随着干扰信号的引入,产生与时间相关的差频(红色曲线),伴随着期望的回波信号。因此,在傅里叶域中,频谱不仅显示单个差频,而且显示若干频率。在最优解中,回波信号(绿色条)的信噪比最大。当存在干扰信号时,本底噪声上升,并且信噪比随接收机带宽fLP 的增大而减小,如图所示。除了检测概率降低外,回波信号的较低信噪比也会导致距离和多普勒频移测量的精度降低。
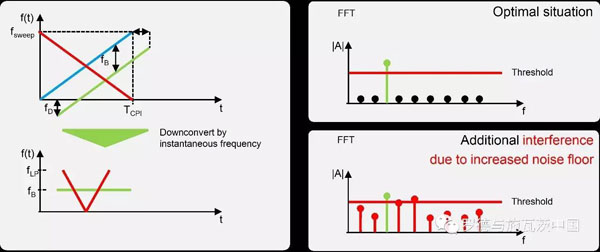
图4:干扰信号影响
接收机本底噪声和物体对应的信噪比取决于硬件、软件和物体的雷达截面积。对于工作在77 GHz的汽车雷达,典型的本底噪声电平约为-90 dBm。一种趋势是将线性调频序列波形与诸如频移键控等其它方法组合,以便减少计算量。然而,截至今天,对于汽车雷达探头,还没有标准给出规范性的干扰和干扰抑制的通用定义。
干扰抑制测试和测量
为了验证抗干扰方法的性能和测试雷达探头的干扰鲁棒性,需要在能够生成任意射频信号的实验室中搭建测量环境。例如,这些信号甚至可以包括发射机位置、天线移动和天线方向图。
图5显示来自罗德与施瓦茨公司的脉冲序列发生器软件生成的典型雷达干扰信号,诸如线性调频连续波(LFMCW)、频移键控(Frequency Shift Keying,
- 利用R&S的电平控制探头产生大动态高准确度信号(10-06)
- R&S的WiMAX全系列测试解决方案(03-23)
- R&S 雷达信号产生和分析方案(07-16)
- 非信令测试“三站式”理念 有效降低产测成本(04-11)
- 测试仪表如何满足包络跟踪放大器的需求(05-07)
- 采用数字示波器进行多域测量(05-07)