基于S3C2410的GPS通讯的实现
时间:10-29
来源:现代电子技术
点击:
CPU:S3C2410微处理器,工作频率为200 MHz; FLASH:16 MB; SDRAM:64 MB SDRAM; UART:RS 232串行接口; 其他:14针ARM JTAG接口等; 液晶显示屏。
串口输出协议:输出NEMA0183格式的ASCII码语句,输出:GPALM,GPGGA,GPGLL,GPGSA,GPGSV,GPRMC,GPVTG(NMEA标准语句);PGRMB,PGRME,PGRMF,PGRMM,PGRMT,PGRMV(GARMIN定义的语句)。还可将串口设置为输出包括GPS载波相位数据的二进制数据。输入:初始位置、时间、秒脉冲状态、差分模式、NMEA输出间隔等设置信息。在缺省的状态下,GPS模块输出数据的波特率为4800,输出信息包括:GPRMC,GPGGA,GPGSA,GPGSV,PGRME等,每秒钟定时输出,如3所示。
3 交叉编译环境的建立及程序的实现
基于Linux操作系统的应用开发环境一般是由目标系统硬件(开发板)和宿主PC机所构成[2]。目标硬件开发板用于运行操作系统和系统应用软件,而目标板所用到的操作系统的内核编译、应用程序的开发和调试则需要通过宿主PC机来完成(所以称为交叉编译)。双方之间一般通过串口,并口或以太网接口建立连接关系。
3.1 烧写Linux内核等
通过串口,宿主PC机向目标开发板烧写VIVI,经过裁减的Linux内核以及根文件系统等,然后安装主编译器Armv41-unknown-linux-gcc。
3.2 NFS服务器的配置
在本文中宿主PC机上装的是READHAT 9.2,他默认的是打开了防火墙,目标开发平台无法用NFS mount。因此应先关闭防火墙,然后点击主菜单运行系统设置→服务器设置→NFS服务器(英文为:SETUP→SYSTEM SERVICE→NFS),点击增加,在目录(Directory)中填入需要共享的路径,主机(Hosts);中填入允许进行连接的主机IP地址[3],并选择允许客户对共享目录的操作为只读(Read-only)或读写(Read/Write)。
3.3 配置MINICOM
在Linux操作系统Xwindow界面下建立终端(在桌面上点击右键→新建终端),在终端的命令行提示符后输入MINICOM,回车,出现WINCOM的启动画面,然后按照提示设置即可。
3.4 编程和调试
在此交叉编译环境下,根据前面提到的GPS定位原理,经过编程和调试,在目标平台的液晶显示屏上可显示本地的地理位置信息。
注意,GPS的天线要放在能良好接受室外信号的地方,比如说窗台等。否则可能接收不到信号。
4 结语
本文介绍了GPS定位的工作原理及其在S3C2410上的实现方法,在车载GPS系统及其他导航系统中有很多的应用前景。
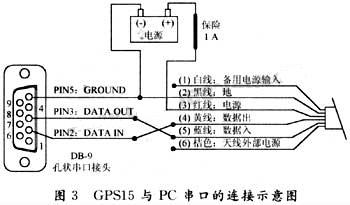
在目标平台S3C2410上所选配的GPS模块是GPS15L/H。接口特性如下:RS 232输出,可输入RS 232或者具有RS 232极性的TTL电平。可选的波特率为:300,600,1 200,2 400,4 800,9 600,19 200。GPS15与PC串口的连接见示意图(图3)所示。
 |
串口输出协议:输出NEMA0183格式的ASCII码语句,输出:GPALM,GPGGA,GPGLL,GPGSA,GPGSV,GPRMC,GPVTG(NMEA标准语句);PGRMB,PGRME,PGRMF,PGRMM,PGRMT,PGRMV(GARMIN定义的语句)。还可将串口设置为输出包括GPS载波相位数据的二进制数据。输入:初始位置、时间、秒脉冲状态、差分模式、NMEA输出间隔等设置信息。在缺省的状态下,GPS模块输出数据的波特率为4800,输出信息包括:GPRMC,GPGGA,GPGSA,GPGSV,PGRME等,每秒钟定时输出,如3所示。
3 交叉编译环境的建立及程序的实现
基于Linux操作系统的应用开发环境一般是由目标系统硬件(开发板)和宿主PC机所构成[2]。目标硬件开发板用于运行操作系统和系统应用软件,而目标板所用到的操作系统的内核编译、应用程序的开发和调试则需要通过宿主PC机来完成(所以称为交叉编译)。双方之间一般通过串口,并口或以太网接口建立连接关系。
3.1 烧写Linux内核等
通过串口,宿主PC机向目标开发板烧写VIVI,经过裁减的Linux内核以及根文件系统等,然后安装主编译器Armv41-unknown-linux-gcc。
3.2 NFS服务器的配置
在本文中宿主PC机上装的是READHAT 9.2,他默认的是打开了防火墙,目标开发平台无法用NFS mount。因此应先关闭防火墙,然后点击主菜单运行系统设置→服务器设置→NFS服务器(英文为:SETUP→SYSTEM SERVICE→NFS),点击增加,在目录(Directory)中填入需要共享的路径,主机(Hosts);中填入允许进行连接的主机IP地址[3],并选择允许客户对共享目录的操作为只读(Read-only)或读写(Read/Write)。
3.3 配置MINICOM
在Linux操作系统Xwindow界面下建立终端(在桌面上点击右键→新建终端),在终端的命令行提示符后输入MINICOM,回车,出现WINCOM的启动画面,然后按照提示设置即可。
3.4 编程和调试
在此交叉编译环境下,根据前面提到的GPS定位原理,经过编程和调试,在目标平台的液晶显示屏上可显示本地的地理位置信息。
注意,GPS的天线要放在能良好接受室外信号的地方,比如说窗台等。否则可能接收不到信号。
4 结语
本文介绍了GPS定位的工作原理及其在S3C2410上的实现方法,在车载GPS系统及其他导航系统中有很多的应用前景。
GPS 相关文章:
- u-blox 发布GPS模块系列产品(09-21)
- 三星WiMAX手机发布(03-03)
- 致力GPS技术十载,Fastrax以iTrax500庆十岁生日(05-17)
- 国巨推出高效能1044贴片型线性GPS天线(06-12)
- 安捷伦科技推出先进的射频 GPS 仿真器(01-01)
- u-blox 第六代 GPS平台升级并增加多项新功能(06-13)