基于ATmega48的简易灭火机器人设计
时间:09-26
来源:3721RD
点击:
8放大后驱动电机进行调速。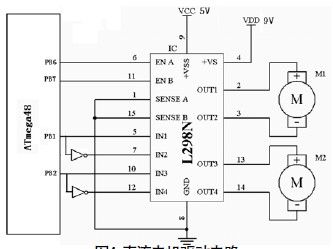
图4 直流电机驱动电路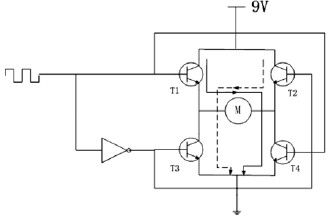
图5 H桥工作原理图
L298里面有两组H桥,可以驱动两个小型直流电动机。如图5所示每一组H桥有四个三极
管,当输入为高电平时,T1、T4导通,电流流向如图中实线所示,假设电机为正转;当输入为低电平时,T2、T3导通,电流流向为虚线所示这时电机反转。那么在一个周期内的直流平均功率为正,则电机正转,直流平均功率为负,则电机反转。比如说:80%占空比时,电机正转;20%占空比时电机反转;50%占空比时电机停转。
6 小结
本设计采用性价比较高的AVR单片机ATmega48作为控制器,设计了一款简易的灭火机器人模型。本设计的灭火机器人还存在一定的技术问题,机器人的活动范围受到局限,反应不灵敏以及干扰问题。在探测火源以及灭火方式还有很大的完善空间。而且,一种灭火机器人不可能适用于不同的建筑场合。因此,必须研究不同建筑结构特殊性,有针对性的研制相应的灭火机器人,以使灭火机器人发挥最大的作用。
- 基于AVR单片机的灭火机器人设计与实现(06-13)
- 基于AVR单片机的简易灭火机器人设计(10-14)
- 基于ATmega48的串口转FSK通信模块设计(01-22)
- 基于神经网络的无位置传感器无刷直流电机驱动(02-08)