基于ATmega32的遥控采摘机器人设计
EEPROM用于存储产品,片内电压调节器为3.3 V输出。
3.3 红外遥控器设计
本设计红外遥控器采用上海贝岭的BL35P12芯片,BL35P12是一款OTP类型低功耗8位通用微控制器(MCU),完成按键的扫描和红外编码信号的生成,现精确控制,故采用此芯片作为遥控主控制芯片。通过操作方向键控制机器人前后左右运动,操作数字键和特殊键可实现不同的动作。
4 软件程序设计
本采摘机器人控制系统的软件设计主要考虑控制的确性和系统的开放性,采用AVR Studio4的编程环境,AVRStudio4是一个完整的开发工具,包括编辑、仿真功能,利用这个工具,可以编辑源代码,并在AVR器件上运行。采摘机器人系统的控制软件由主程序、伺服马达驱动子程序、遥控接收端子程序、传感器处理子程序、直流电机控制子程序等组成。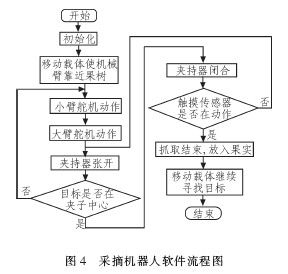
程序主要是对AVR单片机I/O口、T/C(定时器/计数器)、PWM调速、中断处理及全局变量、宏定义等的处理。程序采用结构化和模块化编写思想,使程序的可用性和可读性达到较佳状态。通过调用各个子程序,修改主程序上的直流电机的速度和伺服电机的角度等参数,调试到机器人机械手到最佳角度,根据控制策略进行了软件设计,编制主程序流程图如图4所示。
5 采摘机器人调试与试验
本系统设计的遥控模拟采摘机器人伸展后长为1.2 m,宽度0.38 m,机器人最大速度为0.5 m/s,最大爬坡角度为45°。红外遥控器最长遥控距离为3 m。机器人机械臂动作由舵机控制,这里对机械臂舵机进行测试,各个舵机角度如表1所示。机器人组装测试后完成后抓取实物图测试效果如图5所示。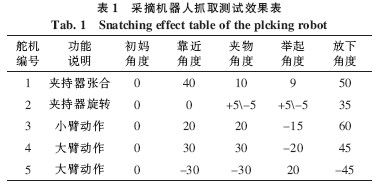

本机器人采用模块化设计,各模块功能互补,提供多种不同的采摘模式,可根据作业环境选择合适的模式进行采摘。同时,功能模块具有很好的扩展性,可通过编程进行模块扩展。同时,可多种任务并行工作,提高了采摘效率。
6 结论
文中设计了一个基于ATmega32采摘机器人,机器人主体使用坚固轻巧材料,保证机器人轻巧,稳定。机器人采用履带底盘驱动,创新设计了双履带条结构,采摘结构设计了二三自由度机械臂,能够灵活地抓取实物。
输入控制程序后,机器人通过外接传感器,可以实现半自主控制和红外遥控。机器人具有振动摇树和逐个夹持两种互补采摘模式。通过实际测试表明这款智能采摘机器人能够较好的完成预期的任务,本设计系统体积小,重量轻。通过试验验证,系统的人机交互能力较强,运行稳定可靠,控制灵活反应迅速,达到了预期的设计目的。尤其是运动速度快,动作灵敏,能够适应复杂果园环境,其快速性和稳定性都达到了规定的要求,机器人扩展性强,功能强大,成本低,具有一定的参考价值。
当然,这只是作为采摘机器人的一种探索设计,离实际作业有很大的差距。在以后的研究工作中,还需要根据实际作业,对挂果果树的高度和果实的大小尺寸,以及果实的脆弱性等实际情况作深入的研究和改进,如果采用完全智能采摘还须加入机器视觉,以等视频监视模块,根据采集的图像信息馈送到遥控机器人平台,指导机械手操作,机械采摘手也应设计应力传感器,以便智能调节张开度,以免损伤果实。