基于ATmega162的指纹识别电子机械锁设计
3 程序设计
系统从睡眠状态启动时,首先进行系统初始化,然后进入正常工作状态,如图6所示。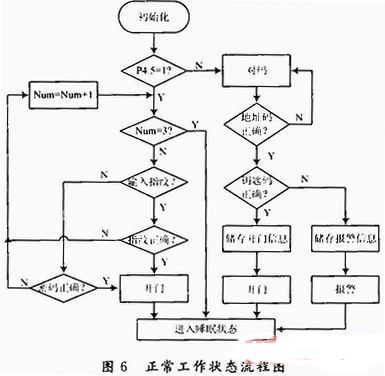
转动机械锁上的金属转接口会改变单片机ATmega162的P4.5的状态。开启金属转接口,单片机ATmega162处理来自机械锁发送的信息;关闭金属转接口,单片机ATmega162处理来自电子锁上指纹识别模块或键盘的信息。
系统还开启了两个中断:设置中断和匹配中断。匹配中断就是电子锁和指定的机械锁进行匹配,只接收来自指定的机械锁发出的信息;设置中断就是指纹和密码的管理。
3.1 匹配中断
匹配中断是链接多特征电子机械锁两个部分的前提,初次安装电子机械锁必须进行匹配中断。在开启该中断前,必须没置好正确钥匙。匹配中断为外部中断,通过按下控制系统模块上的匹配键,进入匹配中断如图7所示。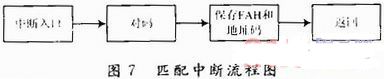
3.2 设置中断
设置中断分为两种模式:普通模式和特殊模式。特殊模式就是利用正确钥匙管理指纹和密码,如图8所示。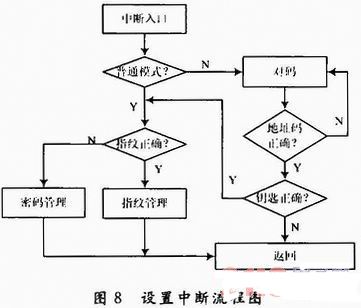
多特征电子机械锁添加了钥匙管理指纹和密码的功能,目前的指纹锁并不具备该功能。当没有管理员指纹,而密码忘记的情况下,该锁可以用正确钥匙进行指纹和密码的添加和删除,给用户带来了方便。
4 实验结果与分析
超外差发送和接收模块之间的通信,由于外界噪声和系统本身的影响,不是每次都能接收到如图3的信息,可能会出现通信错误的情况,为此进行可靠性测试实验。
用示波器精确测量超外差接收模块上的波形的时序,调整代码,使侦测点落在高电平的中间;仔细计算延时函数,确保时间的准确性。在实际调试过程中,进行了5组的实验,每组的测试条件都不同,如温度、环境噪声等,每组测试100次,共计500次的测试,只出现了2次没有正确识别钥匙的情况,可靠性达到99.6%,具有实际应用价值。
5 结语
本文设计的电子机械锁,巧妙利用超外差发送和接收模块,把两个相对独立的部分链接起来。整个系统以单片机ATmega162为核心,直接控制指纹识别模块和键盘,并通过超外差发送和接收模块,间接控制机械锁部分。多特征电子机械锁不仅可以用管理员指纹和密码管理用户信息,还可以使用正确钥匙管理用户信息,目前市场上还没有具备该功能的锁出现。该锁功能强大,给用户带来了方便和快捷的同时,安全性也得到大大提高。
- ATmega16与触摸屏的连接(03-01)
- 基于单片机ATmega16的CCD驱动电路的设计(09-25)
- 基于AVR的LED旋转屏设计(05-01)
- 基于ATmega16与DS18B20的智能温控系统的设计(07-11)
- 基于Atmega16的FEC设计与实现(07-15)
- 基于AVR单片机的高精度频率调节器设计(07-15)