基于ARM的GIS煤矿安全实时监测系统设计
列将处理器内核与片内高速存储器和多项外围功能结合在一片微处理器上,为大量的计算机嵌入式控制应用提供了灵活的低成本的解决方案。
确定了各组成模块后,接下来将各个模块、设备与ARM嵌入式系统开发板使用相应的通信电缆连接起来,根据实际情况,再加上少量的外围器件和电源模块就可以构成硬件平台进行矿井端的系统集成。各模块间的关系如图1所示。
4.矿井端的软件设计
在矿井端中,位置信息的获取、短消息的收发、内部数据的处理以及外围控制设备的驱动都是在ARM芯片的统一控制下完成的,这就需要对嵌入式系统进行必要的编程,本系统基于μClinux操作系统,采用C语言进行编程。
4.1 μClinux开发环境的建立
为了实现基于μClinux的应用系统的开发,建立或拥有一个完备的μClinux开发环境是十分必要的。基于μClinux操作系统的应用开发环境一般是由目标系统硬件开发板和宿主PC机所构成。目标硬件开发板用于运行操作系统和系统应用软件,而目标板所用到的操作系统的内核编译、应用程序的开发和调试则需要通过宿主PC机来完成。双方之间一般通过串口,并口或以太网接口建立连接关系。
4.2 系统软件流程
矿井端由AT91R40008开发板、TC35i, GPS15 OEM板组成,AT91R40008开发板带有两个串口,其中一个串口与GPS接收模块连接,接收来自卫星的位置信息,另一个串口与TC35i连接,将接收到的定位数据打包成短消息格式通过现有通信网络发送出去,实现人员定位和监控管理。整个系统的工作流程大致如下:系统加电进行复位后,自检并初始化。 GPS模块首次开机后会自动搜索星历历书等信息,接收到定位信息后,将我们所需要的经纬度等位置信息进行编解码处理,打包成短消息的格式,通过TC35i 模块发往用户终端或总机,实现全球范围内的定位和监控管理。整个系统流程图如图2所示: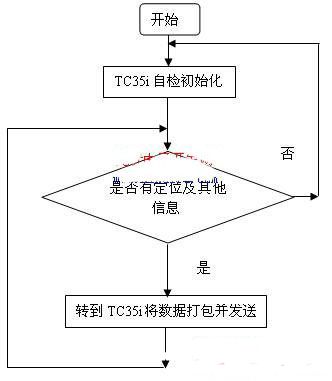
图2 系统流程图
5.结束语
基于ARM嵌入式技术的GIS煤矿安全实时监测系统,主要是利用ARM的强大功能,结合GRP、GSM技术实现了矿井端的煤矿安全实时监测,相对于传统的采用8位单片机作为主控芯片的矿井端,其复杂监控的功能更强,系统更灵活,适用性更好,同时具有更大可扩展性,对加强煤矿安全生产管理将具有一定的推动作用,社会效益和经济效益良好。
- 基于ARM的除法运算优化策略(01-14)
- 基于ARM的CAN总线智能节点的设计(01-24)
- ARM基础知识教程五 (02-08)
- ARM基础知识教程六(02-08)
- ARM基础知识教程七(02-08)
- ARM基础知识教程八(02-08)