基于AVR单片机的灭火机器人设计与实现
时间:06-13
来源:EDN China
点击:
走的过程中不允许碰撞墙壁。找到火源后,通过灭火装置迅速将火灭掉。根据以上的要求设计机器人的灭火逻辑如图8所示。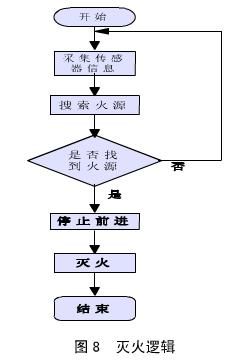
机器人采用左手走规则,左手走规则是指机器人始终沿着左面的墙壁行走,一直走完全程。在行走的过程中按照起点、一号房间、二号房间、三号房间、四号房间的顺序搜索火源并灭火。机器人首先读取传感器信息,然后对传感器的信息进行判断。如果发现火源,则进入灭火子程序,该子程序完成趋光、灭火等功能。
4 结论
本文根据灭火比赛规则的要求,基于单片机及传感器原理,以AVR单片机ATmega32为控制核心,小型直流电机作为驱动元件,设计出一种价格低廉、简单实用的灭火机器人。通过简单的修改,可以将此机器人用于其它的竞赛项目。
- 基于AVR单片机的简易灭火机器人设计(10-14)
- AVR单片机简介 (09-16)
- AVR单片机SPI通讯实例程序(04-26)
- 基于AVR的太阳能控制器设计(07-09)
- 爱特梅尔低功耗微控制器平台开发组合软件加速设计(02-05)
- 选择AVR单片机的24个为什么(07-15)