基于Cortex-M3的MODBUS协议实现及其应用
漏磁探伤作为非接触式的无损探伤技术,其具有检测速度快、灵敏度高、无需耦合剂、易于实现自动化等特点,是钢轨探伤技术的重点研究方向。为解决漏磁探伤研究中的实验仿真问题,研制了基于嵌入式系统的无损探伤试验仪,通过实现MODBUS协议与变频器通信,以此驱动交流电机与机械试验装置,完成运动控制并进行无损探伤试验。
针对无损探伤试验仪中变频器通信问题,依据MODBUS协议规定,利用RealView MDK开发了基于ARM Cortex-M3微控制器的嵌入式软件,实现了与变频器的MODBUS通信,完成变频调速的运动控制功能。
1 MODBUS协议
1.1 MODBOS协议简介
MODBUS是Gould Ine注册的通讯协议商标,该协议具有纠错能力强、数据传输量大、实时性好等特点,是工业自动控制领域使用较广泛的通讯语言,目前已成为我国工业自动化领域的一种国家标准。
MODBUS协议定义了一个控制器能识别的消息结构,它描述了控制器请求访问和应答回应其他设备的过程,以及错误检测和记录的规范,制定了报文字段和内容的公共格式。MODBUS属于应用层报文传输协议,其通信结构为一对多的主从查询模式,即主从Master-Slave模式。 MODBUS网络上可以有多个从节点,但有且只能有一个主节点,主节点按照通信协议对从节点发出请求操作,从设备收到主节点的请求后,做出相应的响应再向主节点回复应答消息。
1.2 MODBOS协议组成
MODBUS协议具有两种传输模式:ASCII模式和RTU模式。ASCII模式中数据以ASCH字符码表示,通过冒号、回车字符判定数据帧的起始和结束,采用IRC数据检验;RTU模式中数据以非压缩BCD码表示,通过时间标记实现数据帧起始判定,采用CRC数据校验,具有数据吞吐量高、传输稳定、通信效率高的优点。
由于变频调速系统的安全性能要求较高,所以选择通信效率高、时间管理严格的RTU传输模式。在协议帧组成上,MODBUS定义了一个基本的,与通信层无关数据协议单元PDU(Protocol Data Unit),并通过在PDU上添加地址、校验等附加域定义了应用数据单元ADU(Application Data Unit),形成完整的数据帧,MODBUS RTU数据帧组成如表1所示。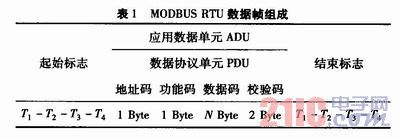
在数据帧起始判定上,MODBUS RTU采用了如图1所示的时间标记方法,即相邻的两帧之间必须间隔至少为总线发送3.5个字符的时间,该时间称为T3.5。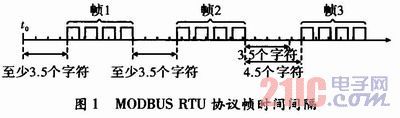
在MODBUS数据帧中,功能码是指主节点对从节点的请求操作类型,常用的MODBUS功能码及其功能如表2所示。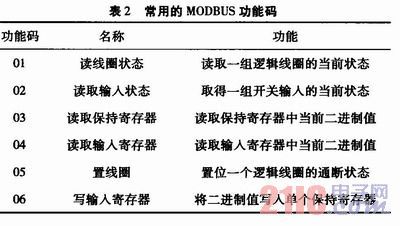
MODBUS RTU采用循环冗余校验码CRC(Cyclic Redundancy Check)是一种被广泛采用的多项式编码,编码简单且误判概率很低,在串行通信、以太网、MPEG解码等通信领域中得到了广泛应用。在通信过程中,发送方用待发送数据除以一个收发双方约定的生成多项式,将得到余数作为CRC校验多项式,附加在待发送数据尾部作为一个整体发送给接收方。接收方将收到的数据同样除以生成多项式,若余数为零刚传输正常,若余数不为零则传输出错。
2 电路连接及硬件参数
在无损探伤试验仪中,选用基于ARM Cortex-M3内核的STM32F103ZET6微控制器作为处理核心,而变频器采用了烟台惠丰公司的F2000-G矢量变频酪。STM32F103ZET6通过基于MAX3485的RS485链路与F2000-G相连,按照MODBUS协议与之通信,实现变频调速的控制功能。RS485接口电路如图2所示,STM32F103ZET6的USART3的Uart3Rx、Uart3Tx连接到MAX3485的RO、DI以进行RS232的数据收发;STM32F103ZET6的GPI01以I /O模式与MAX3485的接收使能端RE、发送使能端DE相连,对RS485半双工总线的通信方向进行统一控制;而MAX3485的差分信号端A、B则通过插座与F2000-G相连,同时为保证通信质量,消除总线上的信号反射,需在RS485网络终端的差分总线间串联50 Ω的电阻R1。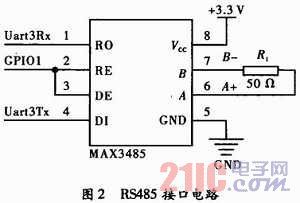
在外设初始过程中,首先需要初始化USART3,按照F2000-G要求,采用的通信参数为:波特率9 600 kb·s-1,8位数据位,2位停止位,无奇偶校验;其次,还需初始化STM32F103ZET6的GPI01为输出模式,以此控制RS485的通信方向;再次,由于MODBUS RTU采用时间标记的方式进行协议帧的起始判定,所以使用STM32F103ZET6的定时器TIM2用以判定数据帧的结束,而MODBUS RTU中T3.5在工程应用通常取4个字符发送时间,因此设置TIM2的溢出时间为3 ms;最后,为处理可能的总线延迟等通信故障,本文使用了系统定时器SysTick作超时判定,综合考虑到变频器动作时间、通信延迟等因素,超时判定的时间阈值取200 ms。
3 MODBUS协议实现
在变频调速系统中,STM32F103ZET6作为主节点负责变频调速系统的功能控制,而变频器F2000-G作为MODBUS从节点负责响应主节点的请求,完成对交流电机的运动控制。因此本文中变频调速系统为基于MODBUS协议的主节点程序实现,MODBUS协议主要分为3部分:数据帧发送,数据帧接收和数据帧处理。
3.1 数据帧发送
发送数据时,必须将请求操作封装成标准的MODBUS协议帧才能成功进行发送,即MODBUS协议的编码。由前所述,数据协议单元PDU包括功能码和数据码,PDU的封装可以归纳为将操作类型和操作参数作为参数封装成PDU。构建PDU之后,在数据帧头部加入从机的地址,再将CR-C16校验值写入数据帧尾部即构成完整的应用数据单元ADU。
MODBUS中使用CRC16作为冗余校验,按照循环冗余检验算法,使用标准16位生成多项式,可对任意长度的信息字段校验出一个16位的校验码。其程序流程可描述如下:
(1)初始化一个16位寄存器,所有位进行置1。
(2)该16位寄存器与待校验数据串中第1 Byte的数据进行异或,结果存回该寄存器。
(3)该16位寄存器右移一位。
(4)若该寄存器右移移出位为1,则与校验多项式0A001H异或,否则重复步骤3。
(5)重复步骤3和步骤4直到该Byte的8位数据均处理完毕。
(6)取数据串中下一个数据与该16位数据进行异或结果存回寄存器。
(7)重复步骤3~步骤6,直到待校验数据串中所有的字节数据均处理完毕。
(8)该16位寄存器中数据即CRC16的最终校验结果,加至数据帧末端。
因为STM32F103ZET6芯片内USART3无硬件FIFO的特点,所以需要软件上使用队列的数据结构作为发送缓冲和接收缓冲,以此进行串行口的收发任务。因此,在工作模式上USART3的发送采用查询式发送,一次性将发送缓冲区中的数据依次循环地发送出去,即队列的出队操作;而其接收模式为中断式,在USART3每次接收中断的响应函数中,软件按时间先后顺序将数据写入接收缓冲区内,即队列的入队操作。
3.2 数据帧接收
在发送完请求帧后,STM32F103ZET6通过GPIO操作总线的收/发使能端,将RS485总线由发送状态改为监听状态。在监听过程中SMT32F1-03ZET6完成变频器F2000-G应答帧的接收。
由于MODBUS RTU应答帧判定采取了时间标记法,因此本程序中使用了TM2作为触发器进行时间管理。在接收过程中,USART3每次接收中断对TM2进行复位操作以避免TIM2的溢出中断;而当总线空闲了3.5个字符的发送时间后,TM2由于缺少USART3的复位,将产生溢出中断,在中断响应中完成关闭USART3结束数据通信和置应答帧接收完成标志位的操作。这种时间标记的程序均在后台中断中完成,主程序只需查询接收完成标志位即可。
另一方面,由于从节点F2000-G可能存在着超时、无应答等通信故障,这就需要主节点STM32F103ZET6进行超时检测。在STM32F103ZE6中,SysTick作为系统定时器,在芯片启动后就以后台方式运行,按ms计时并实时更新系统时间。因此在MODBUS RTU的超时判断中,主程序可以利用该时钟,循环地查询当前时刻,并和发送完请求帧的起始时刻比较,若阈值时间200 ms内仍然未收到请求帧,则认为通信失败,返回应答超时码。
3.3 数据帧处理
在完成数据帧正确接收的基础上,STM32F0103ZET6必须进行应答帧处理,即MODBUS协议帧的解码。系统从接收缓冲区中读取应答帧。首先提取ADU进行地址码和CRC校验码的判定;其次,再从PDU中提取ADU进行数据长度、功能码、数据码的判定;最后,如果校验失败则返回相应的校验失败码,若校验成功,则继续从ADU/PDU中提取的数据进行处理,完成变频调速的各种功能操作。最终,整个协议实现的软件流程如图3所示。
变频调速 运动控制 Cortex-M3 Modbus协议 相关文章:
- 采用PCI9052设计PCI总线运动控制卡(05-04)
- 基于嵌入式运动控制器系统的设计与开发(08-28)
- ARM+PCL6045B的嵌入式运动控制器设计(11-29)
- 基于PCI总线的STM32运动控制卡的设计(01-21)
- 基于32位DSP及电机驱动芯片的悬挂运动控制系统设计(09-30)
- 基于Cortex-M3内核处理器的嵌入式Web服务器设计(02-17)