基于ARM处理器的CAN节点设计
引言
随着信息技术的飞速发展,基于ARM在嵌入式系统方面的优势和CAN总线的广泛应用,目前越来越多的ARM处理器内部自带了CAN控制器,极大的方便了开发人员对CAN总线的开发。本课题是基于ARM2104的微处理器CAN总线系统节点开发,采用CAN总线可以将节点控制器直接安装在现场,数据经处理后发送到总线上,实现了信息的全数字方式传输,提高了传输的抗干扰能力,增加了信息的传输量。
总体设计方案
本课题中所设计的是CAN总线系统节点,系统节点结构图如图1。
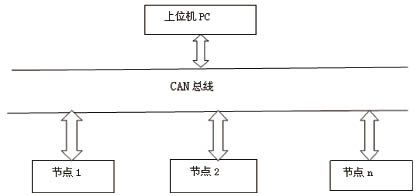
图1 系统节点结构图
CAN总线系统应用要求:CAN总线接口的扩展、点对点通信。
CAN节点的设计主要是CAN通信控制器与微处理器之间、CAN总线收发器与物理总线之间的电路的设计。微控制器主要负责CAN控制器的初始化,进行与CAN控制器的数据传递,并按照预定的程序进行处理;CAN的通信协议主要由CAN控制器完成,CAN控制器主要负责将数据以CAN报文的形式传递,并进行系统的诊断、测试以及处理CAN总线上的错误等;而CAN总线收发器是CAN控制器和CAN总线之间的接口,完成物理电平的转换,功能是增大通信距离,提高系统的瞬间抗干扰能力,保护总线,降低射频干扰(RFI)。
通常一个完整的CAN节点应该包括三个部分:微控制器、CAN控制器、CAN收发器。目前广泛流行的CAN总线器件有两大类:一类是独立的CAN控器,另一类是带有在片CAN的微控制器。
CAN节点硬件电路设计
对于CAN节点硬件电路的的各接口电路的设计有:CAN接口电路、CPU模块、外围电路(复位电路和JATG接口电路)。其中CPU及电源电路如下图2所示:
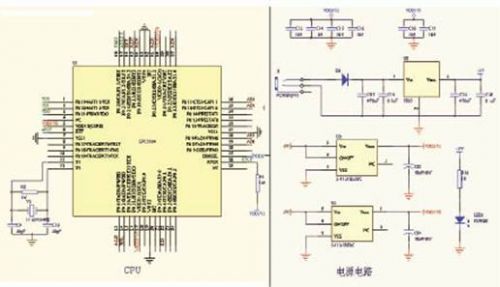
图2 CPU及电源模块
LPC2104要使用两组电源,I/O供电电源为3.3V应用系统。首先,电源DW1将电源整流,经过C1、C3滤波,然后通过78M05将电源稳压至5V,再使用LDO芯片(低差压电源芯片)稳压输出3.3V及1.8V电压。LD0芯片采用S-1131B33UC和S-1131B18UC,其特点为输出电流大、精度高、稳定性高、功耗低。
设计中的CPU芯片与控制器SJA1000的配脚图如图3所示。
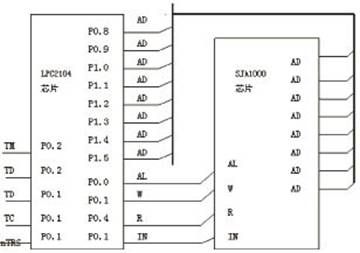
图3 模拟总线硬件图
CAN节点的软件设计
CAN节点的软件设计主要包括ARM处理器的编程和SJA1000驱动程序的设计。在硬件电路确定以后,系统控制的主要功能将依赖于软件来实现。系统能否正常可靠的工作,除了硬件的合理设计以外,与功能完善的软件设计是分不开的。
软件程序流程图如下图4所示:
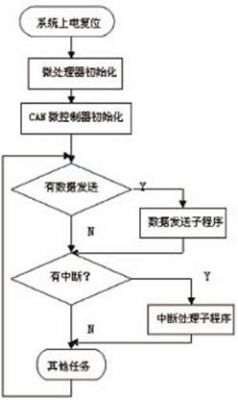
图4 主程序流程图
配置软件包使用的GPIO必须在文件config.h中进行,其程序清单如列表1所示,其中程序清单(1)设置地址总线的宽度,只能为8、16、和24三个值之一。清单(2)设置信号AD0对应GPIO,其中0对应P0.0,1对应P0.1,以此类推。地址/数据总线的其它信号以这个信号为基准,顺序定义。清单(3)信号ALE对应GPIO,其中0对应P0.0,1对应P0.1,以此类推。清单(4)信号WR对应GPIO,其中0对应P0.0,1对应P0.1,以此类推。
程序清单列表1 配置总线使用的GPIO
#define ADDR_N_BIT 16 (1)
#define AD0_PIN_NUM 8 (2)
#define ALE_PIN_NUM 0 (3)
#define WR_PIN_NUM 1 (4)
#define RD_PIN_NUM 4 (5)
#include"exbus.h" (6)
本系统CAN控制器采用SJA1000,SJA1000控制器在微控制器正常通讯前,都必须先在相应地址寄存器中加载,确定接收标识码、总线接收波特率以及输出控制等,这就是CAN控制器的初始化。系统所用的CAN总线控制器SJA1000和CAN2.0A以及CAN2.0B两个版本的协议同时兼容。本系统设计以CAN2.0A的Basic CAN为协议标准进行设计。
测试之前编写的程序前首先要确定SJA1000的片选地址,确定与其他外部存储器无冲突。其次,微处理器对SJA1000的控制访问是以外部存储器的方式,来访问SJA1000的内部寄存器,所以应该正确定义微处理器访问SJA1000时,SJA1000内部寄存器的访问地址。
整个流程进行测试之后,SJA1000有8个不同的中断,这些中断可使主控制器立即作用在CAN控制器的某些状态上。一旦CAN产生中断,SJA1000就将中断输出(管脚16)设为低电平,直到主控制器通过读SJA1000的中断寄存器对中断采取相应措施,在主控制器响应后中断,或接收INFO里有更多有效数据,SJA1000立刻将中断输出再次设为低电平。采用中断接收的方式来接收数据,LPC2104的P0.16设置为外部中断INT,整个数据接收模块由数据接收函数void ReceiveData(uint8 *Rt)、中断处理函数CANException(void)构成。当SJA1000接收到CAN总线数据,通过接收中断使得LPC2104产生外部中断INT而使其进入中断处理函数,进而对接收到的数据进行处理。
可想,在CAN节点的软件设计的整个流程中,当硬件电路确定以后,系统控制的主要功能将依赖于软件来实现,并且能够正
- 基于ARM处理器和Linux操作系统的电磁流量计设计方案(03-27)
- 处理器全方位能耗测量的实现(05-02)
- 一种高效率的定时器管理模块设计(06-15)
- Lonworks总线多点I/O智能节点的开发(09-18)
- 基于ZigBee技术的无线传感器网络节点的设计(06-07)
- 电机温度监测系统低功耗无线节点模块设计(01-04)