基于瑞萨QzROM单片机的EFT抗干扰措施
QzROM是应用了经过细微化处理的PROM技术的可编程存储器。QzROM单片机是指搭载了新型存储器QzROM的瑞萨单片机(图1),广泛应用于照相机、便携式设备、家电及民用设备等。
EFT概念
EFT(电快速瞬变脉冲群,如图2)是由电路中的感性负载断开时产生。特点是一连串的脉冲,对电路的影响比较大,可造成MCU(单片机)程序跑飞、死机、复位等情况。由于一连串的脉冲可以在电路的输入端产生累积效应,使干扰电平的幅度最终超过电路噪声门限。
当脉冲串的每个脉冲相距很近时,电路的电容没有足够时间放电,就又开始新的充电,容易达到较高的电平。所以脉冲串的周期越短对电路影响越大。
EFT抗干扰措施,主要介绍三类方法:
1.优化PCB(印制电路板)布线
•在元件布局方面,需优先放置MCU(单片机)、时钟、复位电路;将元器件划分不同的功能模块,合理摆放各模块位置,调整元器件角度,缩短总布线长度。
•在布线宽度、布线间隙方面,尽量用更粗的布线宽度和布线间隙,减少在干扰下导线上的电压对信号的影响,同时减少各个布线间的干扰。
•在地线、电源线布置方面:尽量将MCU、时钟、复位电路的地线、电源线与其他功能分离开来,低频时注意覆铜的放置,应尽量缩短布线长度。
•时钟电路方面,用最短的布线连接时钟电路与MCU,过长的布线更容易引入干扰,见图3;将晶振的地线与其它功能的地线分开,给晶振部分单独铺设多边形覆铜;避免大电流从晶振电路下方流过。其原因是:如果有噪声侵入时钟输入/输出(I/O)引脚,时钟的波形就会发生紊乱,导致误动作和失控。另外,如果因噪声引起单片机Vss电平和谐振器Vss电平之间的电位差,正确的时钟就不能输入到单片机。
•复位电路:尽可能缩短连接复位电路与MCU的布线长度,见图4。理由是:因为时序必要条件规定了输入到复位引脚的脉宽,所以,如果小于规定宽度的脉冲噪声输入到复位引脚,就在单片机内部完全进入初始化状态前解除复位,导致程序失控。
•去耦电容:在靠近MCU的地方放置去耦电容,布线应驱使电流流向去耦电容。
•CNVss引脚(控制芯片运行模式管脚)方面,如果不使用在板编程功能,应直接将CNVss连接到Vss;在需要在板编程的情况下,在靠近MCU的地方用5.1kΩ电阻连接到Vss,应尽量缩短CNVss的布线长度。
•P40(Vpp)引脚的布线:在将P40(Vpp)引脚用作输入端口时,应尽量在P40(Vpp)引脚附近串联插入约5kΩ的电阻;在未使用P40(Vpp)引脚时,应尽量从提供给单片机Vss引脚的GND(地)以最短距离连接到最近的GND布线,另外,通过串联插入的5kΩ的电阻并连接到GND,有可能改善抗噪声能力,此时也尽量从提供给单片机的Vss引脚的GND以最短距离连接到GND布线,见图5。
理由:P40(Vpp)引脚是内部QzROM的电源输入引脚,在将程序写到QzROM时,为了产生泄电流,降低了P40(Vpp)引脚的阻抗,所以噪声容易侵入,QzROM的指令码和数据的读操作就不能正常进行而导致失控。
2. I/O端口处理
•未使用引脚的正确处理:
(1)只能设为输入模式,用1k~10kΩ的电阻将各引脚上拉或下拉,有内部上拉的,也可选用;
(2)只能设为输出模式,引脚开路,输出高或低电平;
(3)其他I/O,推荐设为输出,引脚开路。
•未使用引脚处理时的注意事项:
(1)I/O口设置成输入时,不要开路;
(2)I/O口设置成输入时,不要直接连接到Vcc或Vss,也不要一个电阻将多个端口一起连接到Vcc或Vss,以防止因噪声或程序失控等引起方向寄存器变成输出模式时,端口间发生短路;
(3)采用输出模式,软件处理上要定期刷新端口状态,以防止因噪声和程序失控等引起方向寄存器变成输入模式时,端口电平不定,可能会造成电源电流增加。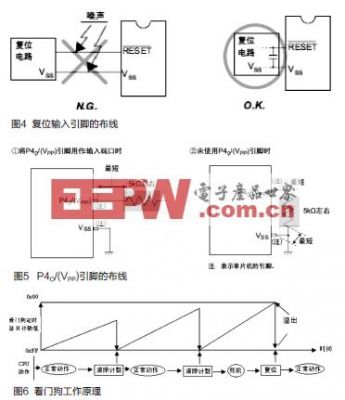
3. 优化程序结构设计
•指令冗余:
(1)关键位置的多字节指令之后插入2个以上的单字节指令(NOP),避免后面的指令被当作操作数;
(2)跳转指令(JMP,JSR,BRA)和返回指令(RTI,RTS)前插入两条NOP,避免程序乱飞。
•软件陷阱:
(1)未用中断向量
指向一个错误处理程序,防止干扰激活未用中断使程序跑飞;
(2)在未使用的程序空间,ROM中存储表格后面,程序区重要的子程序之间加入跑飞处理程序:
Subroutine: ;子程序
RTS
NOP
NOP
B RunAway
RunAway: ;跑飞处理子程序
RTS
•结合软件使用看门狗,见图6:
(1)MCU正常工作时,定时给看门狗定时器初始化;(2)当MCU跑飞时,由于没有在看门狗定时周期内初始化,看门狗定时器计数溢出产生复位信号,使MCU复位;(3)看门狗初始化设置:①无中断使用时,主程序循环中初始化看门狗;②使用中断,在中断程序中