ARM+PCL6045B的嵌入式运动控制器设计
口参数配置。
②通信模块:负责运动控制卡和上位机之间的坐标值、速度值、数控系统的I/O接口状态、报警状态以及数据链表的传输。
实时域建立在RTAI实时内核的基础上。其实时任务通过实时进程的方式来完成,一种为周期性(peri_odic)实时进程,另一种为一次性(one shot)实时进程。实时域主要包括如下4个周期性实时线程:
①状态检测线程(rt_monitor_thread)。本任务对设备运行状态进行检测,负责从I/O端口读入各个连接的I/O设备值,然后将状态写入状态检测缓冲区中,对设备急停、伺服报警、限位信号进行判断,并进行相应的处理。
②插补线程(rt_interpolaTIon_thread)。从译码缓冲区中顺序取得插补数据,然后根据是直线或者圆弧进行插补,插补得到下个周期应该到达的理论坐标值。
③位置控制线程(rt_position_thread)。读取计数器中编码器的数值,得到实际的位置,并与插补器中的理论位置坐标作比较。根据差值调节PID参数,并将具体脉冲输出数写入对应的PWM口的脉冲数寄存器中。
④功能控制线程(rt_function_thread)。功能控制任务利用RTAI实时管道来传递命令和状态信息的功能。通过管道的命令设置实现Linux操作系统对实时部分RTAI的访问,从而实现运动控制器的运行、暂停、给定速度等状态设置。
2.1 软件平台的建立
软件平台是系统应用程序开发的基础。本系统软件平台主要包括:ARM-Linux的移植、串行接口驱动开发、USB接口驱动开发、LCD接口驱动开发、触摸屏接口驱动开发、以太网接口驱动开发、文件系统的移植等。这些软件的开发和移植在很多文献中有详细的说明。
2.2 运动控制函数库的设计
通用运动控制器的功能主要取决于运动控制函数库。要做成一个开放式的运动控制器,必须编写丰富的运动控制函数库,以满足不同的应用要求。运动控制函数库要为单轴及多轴的步进或伺服控制提供许多运动函数,如单轴驱动、两轴直线插补、3轴直线插补、圆弧插补等等。另外,为了配合运动控制系统的开发,还编写了一些辅助函数,如中断处理、编码器反馈、间隙补偿、通用开关量的输入输出等。这样,用户在开发应用程序时就不必再关心底层的东西,只需根据控制系统的要求编制人机界面,并调用运动控制函数库中的函数,就可以开发出满足要求的多轴运动控制系统。
2.3 对Ljnux进行实时化改造
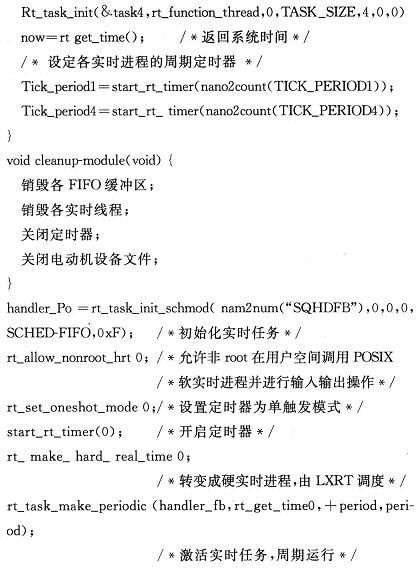
由于Linux不是一个实时操作系统,所以,利用实时内核补丁RTAI(Real Time Application InteRFace)。RTAI的安装和使用详见参考文献[7]。该控制器所使用的Linux开发环境为ELDK(Embedded Linux DevelopedKit)3.0。Linux内核为Linuxp pc_2_4_devel,而RTAI的版本为24.1.12。由Linux中的init_module()和cleanup_modtde()两个函数加载和卸载实时任务模块,通过这两个函数进行实时线程及其处理函数的创建和回收。其关键程序如下: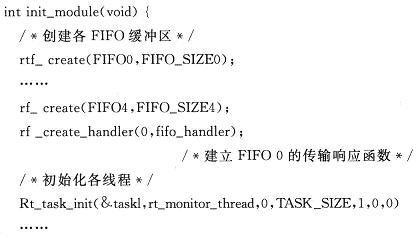
2.4 应用软件设计
应用软件主要包括人机交互界面的设计、数控指令的编译解释、按键功能的实现、运动状态的监视等。通过操作系统ARM-Linux,可方便地实现上述功能,并进行多任务的调度。运动控制器根据输入的数控指令文件,将其存入NAND Flash中。ARM处理器通过对数控指令进行译码、速度预处理、粗插补计算等,调用运动控制函数,进而发出控制指令控制步进或伺服系统去控制执行部件进行动作,从而达到实现运动控制的目的。
结 语
本文综合应用ARM嵌入式系统技术、DSP运动控制技术等多种技术开发出高性能的嵌入式运动控制器。该控制器相比传统的基于PC机的运动控制器,具有成本低、体积小、功耗低、功能丰富、运行稳定的特点和优势。以ARM微控器和PCL6045B为核心的嵌入式运动控制器,采用Linux操作系统,经过对其进行实时化改造,使系统能很好地进行多任务处理,保证了系统的实时性。该控制器能够实现高速和高精度的运动控制需求,具有良好的运动控制性能。该运动控制器的设计,为读者提供了一种良好的解决方案,在运动控制领域具有广阔的应用前景。
- 基于嵌入式运动控制器系统的设计与开发(08-28)
- 基于ARM+DSP的驾驶员眼部疲劳视觉检测算法设计(08-24)
- 基于PIC18F系列单片机的嵌入式系统设计(11-19)
- 利用BIOS定制实现嵌入式产品的差异化 (01-14)
- 基于Wishbone片上总线的PCI Bridge核的研究和应(01-26)
- AT91RM9200在嵌入式税控POS系统中的应用(01-14)