基于ARM平台的MEMS输入设备的固件设计
1 引言
MEMS(Micro Electro Mechanical System,即微机电系统)是指集微型传感器、执行器以及信号处理和控制电路、接口电路、通信和电源于一体的微型机电系统,具有体积小、重量 轻、性能稳定、可大批量生产、性能一致性好、成本低等特点,将MEMS器件--加速度传 感器应用于输入产品和嵌入式系统,满足它们对倾斜、运动、定位、振动等微小变化的测量 需求,以MEMS替换机械控制部件,为消费产品带来了一场革新。
国外和港台地区有一些单位正在开展这方面的研究,并取得了一定的成绩。例如:香港 中文大学Alan H. F. Lam等几个博士生提出了一种基于微加速度传感器的虚拟键盘鼠标系统 (MIDS),能同时具备鼠标和键盘的功能[1];加州大学伯克利分校设计了一种加速度感应手 套,利用放置在手指上的二维加速度传感器感测手和手指的动作,实现电脑输入的功能[2]。
2. 系统设计
本文设计的无线输入系统是以加速度计为敏感元件,来完成鼠标的功能,并能够在三维 空间上同步操作者的三维运动,从而实现电脑输入的目的。本文采用美国AD公司的微加速 度传感器ADXL203,并结合Nordic半导体公司的射频收发器NRF2401,与Philips公司的 D12USB接口芯片形成一个硬件体系。该系统由两个子系统组成:远端子系统和主机端子系 统,具体的构成如图1所示。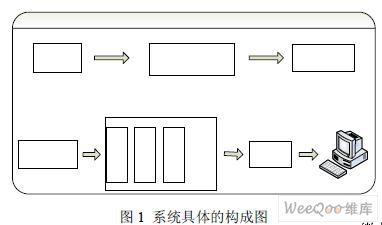
在软件开发上,采用 ARM 嵌入式系统的开发理念,采用内置有ARM7 处理器核的 LPC2214 微控制器,开发新一代基于微加速度传感器的MEMS 无线输入设备。在调试初期, 以周立功公司的EasyARM2200 开发板为开发平台,使用ADS 作为开发环境。
2.远端子系统设计
远端子系统的主要任务是加速度计信号的采集,信号的放大、滤波等的处理,控制器 对射频无线发送的软件控制。主要的实现过程为:使用GPIO 口,并按照一定的采样频率将 加速度信号送入微控制器LPC2214,在LPC2214 内部进行信号放大和A/D 转换;并且按照 无线传输模块定义的格式将数据进行编码,再通过GPIO 口传送给无线射频模块。 主程序主要实现各个器件的初始化和任务的调用。
int main(void)
{
TargetInit();
Init_RF();
Init_ADC();
Init_Transmitter();
TaskMouse();
return 0;
}
在完成各个模块的初始化之后,执行Taskmouse 函数。Taskmouse 函数是主执行函数, 包含了GetMousePos()、ModeSelect()、Get_ADCValue_X()和Get_ADCValue_Y()等子函数。 调用该函数就可以执行加速度计信号采集、鼠标位置确定、系统工作模式选择等程序行。 获取鼠标位置信息的示意程序如下所示:
void GetMousePos(uint8 *buf, uint8 shift)
{
uint8 i;
uint8 sampf = 50;
uint32 dpi = 100;
uint32 sum_x, sum_y;
sum_x = sum_y = 0;
for (i = 0; i < sampf; ++i) {
sum_x += Get_ADCValue_X(dpi);
sum_y += Get_ADCValue_Y(dpi); }
buf[0] = (sum_x / sampf) >> shift;
buf[1] = (sum_y / sampf) >> shift;
}
3.主机端子系统设计
在主机端子系统中,NRF2401 接受远端子系统的数据并从I/O 口进入LPC2214,数据通 过协议等处理为鼠标格式,最后通过USB 接口发送给主机。在该模块中,我们采用了操作 系统来实现多任务处理。
3.1 μC/OS-II 操作系统的移植
我们使用的 μC/OS-II 是一个完整、可移植、可固化、可剪裁的占先式实时多任务的实 时操作系统内核,使用标准的ANSIC 语言编写, 并包含一段汇编语言代码,被广泛地应用 于各种架构的微处理器上。
在本系统中,μC/OS-II 的移植主要是修改3 个与ARM 处理器体系结构相关的文件: OS_CPU.H、OS_CPU.C 和OS_CPU_A.ASM。OS_CPU.H 文件为系统通用量设置的移植文 件,采用C 语言描述。包含数据类型定义、堆栈单位、堆栈增长方向和宏定义,需根据处 理器进行相应修改;OS_CPU.C 文件为系统管理代码的移植文件, 采用C 语言描述; OS_CPU_A.ASM 文件为处理器相关代码的移植文件, 采用ARM 的汇编语言描述。
3.2 控制器编程
将操作系统成功移植到LPC2214 上后,就可以对主机端系统进行软件设计。下面是主 机端主函数的代码:
int main (void)
{
OSInit();
OSTaskCreate(TaskStart, (void *)0, &TaskStartStk[127], 5);
OSStart();
}
主函数首先对操作系统进行初始化,初始化完成后,创建启动任务,设置任务的优先级, 并开始进行多任务操作。启动任务TaskStart 主要完成各个模块的初始化,包括开发板的初 始化TargetInit(),射频芯片的初始化Init_RF(),控制器AD 转换的初始化Init_ADC(),USB 接口芯片的初始化Init_D12()等,并将射频无线接受设置为接收模式。最后调用主执行函数 TaskDis
- 一种20M低相位噪声晶体振荡器的设计(05-20)