基于Linux和s3C2440的GPC控制器设计
时间:01-24
来源:作者:单片机与嵌入式系统 江西理工大学 徐涢基 杜宝祯 祝静 何鹏举
点击:
3 GPC算法的设计与实现
广义预测控制算法是Clarke等人于1987年提出的。该算法在保留了DMC、MAC等算法中多步预测优化策略的基础上,同时借鉴了最小方差自校正控制中的模型预测、最小方差控制、在线辨识的思想。因此对模型精度要求低,对变时滞的对象具有较强的鲁棒性,近年来得到了广泛的应用和重视。本文采用GPC算法解决时延问题。
3.1 GPC算法
在GPC中,采用最小方差控制中使用的受控自回归积分滑动平均模型(CARIMA)来描述被控对像,即
3.2 MatIab仿真及生成目标代码
RTW是Matlab提供的代码自动生成工具,可使Simulink模型自动生成面向不同目标的代码。目前通过Matlab/RTW可生成在PC、ARM等设备上运行的代码,以及在Windows、Linux等系统上运行的可执行文件。利用RTW自动生成代码,可使工程师专注于系统设计和实现,减轻编程工作量,加快产品研发的速度。GPC算法的仿真和调试是在Matlab7.0环境下,利用MPC工具箱,编制了相应程序而实现。由于Matlab中,m语言无法直接移植到嵌入式控制器中,因此先要用simulink构建系统模型,然后再用Real-Time Workshop自动生成面向ARM平台的C代码。
利用RTW自动生成代码的实验步骤如下:
①用Matlab的m语言编写GPC算法程序,仿真通过后,封装成Simulink仿真框图,并建立GPC控制系统模型Model.mdl。
②在Simulink窗口中,选择Simulink|Configuration Parameters选项,对solvet option、Data Import/Export等进行设置。
③选中Generate code only复选框,单击build,代码自动生成。
④整合底层驱动函数、用户定义的函数以及自动生成的GPC程序,编译生成目标文件。
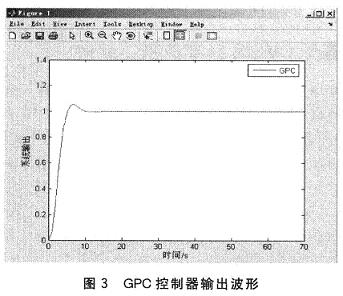
从图3可以看出,在伴有随机扰动的二价系统中,基于GPC算法的控制器的超调量和调节时间都比较小,且上升时间快,表现出良好的动态性能和鲁棒性。这和GPC算法多步预测、滚动优化的特点是分不开的。
本文成功构建了网络化控制器节点的软硬件平台,并通过Matlab/RTW半实物仿真的方法,实现了GPC算法的快速移植,对网络延迟进行了补偿。该测控平台应用范围相当广泛,适用于基于Ethernet的嵌入式Web控制器,满足远程实时控制需求,具有一定的应用前景。 (发布者:chiying)
广义预测控制算法是Clarke等人于1987年提出的。该算法在保留了DMC、MAC等算法中多步预测优化策略的基础上,同时借鉴了最小方差自校正控制中的模型预测、最小方差控制、在线辨识的思想。因此对模型精度要求低,对变时滞的对象具有较强的鲁棒性,近年来得到了广泛的应用和重视。本文采用GPC算法解决时延问题。
3.1 GPC算法
在GPC中,采用最小方差控制中使用的受控自回归积分滑动平均模型(CARIMA)来描述被控对像,即

3.2 MatIab仿真及生成目标代码
RTW是Matlab提供的代码自动生成工具,可使Simulink模型自动生成面向不同目标的代码。目前通过Matlab/RTW可生成在PC、ARM等设备上运行的代码,以及在Windows、Linux等系统上运行的可执行文件。利用RTW自动生成代码,可使工程师专注于系统设计和实现,减轻编程工作量,加快产品研发的速度。GPC算法的仿真和调试是在Matlab7.0环境下,利用MPC工具箱,编制了相应程序而实现。由于Matlab中,m语言无法直接移植到嵌入式控制器中,因此先要用simulink构建系统模型,然后再用Real-Time Workshop自动生成面向ARM平台的C代码。
利用RTW自动生成代码的实验步骤如下:
①用Matlab的m语言编写GPC算法程序,仿真通过后,封装成Simulink仿真框图,并建立GPC控制系统模型Model.mdl。
②在Simulink窗口中,选择Simulink|Configuration Parameters选项,对solvet option、Data Import/Export等进行设置。
③选中Generate code only复选框,单击build,代码自动生成。
④整合底层驱动函数、用户定义的函数以及自动生成的GPC程序,编译生成目标文件。
从图3可以看出,在伴有随机扰动的二价系统中,基于GPC算法的控制器的超调量和调节时间都比较小,且上升时间快,表现出良好的动态性能和鲁棒性。这和GPC算法多步预测、滚动优化的特点是分不开的。
本文成功构建了网络化控制器节点的软硬件平台,并通过Matlab/RTW半实物仿真的方法,实现了GPC算法的快速移植,对网络延迟进行了补偿。该测控平台应用范围相当广泛,适用于基于Ethernet的嵌入式Web控制器,满足远程实时控制需求,具有一定的应用前景。 (发布者:chiying)
S3C2440 Linux GPC控制器 GPC 相关文章:
- 千兆网络接口在S3C2440A系统中的应用(10-19)
- 基于嵌入式ARM9的USB设计与实现(07-16)
- 基于嵌入式系统的银行评价器设计方案(03-29)
- 基于S3C2440的LED背光源节电系统设计方案(02-18)
- 基于S3C2440的基础介绍、技术文献及设计方案大全(03-08)
- SoC前段(ARM)嵌入式系统开发实作训练(上) (02-28)