基于ARM的数控算法图示仪设计
时间:08-07
来源:作者:西南科技大学 黄金伟 刘宏伟 周显军 罗亮
点击:
器的值,接着读取方向信号的电平。在与上一次的计时数值比较后,如果相同,则说明机床在做直线运动,不需要刷新显示屏,程序返回;如果计数值或电平发生了变化,则通过邮箱向更新任务发送相关数据,然后发送信号量通知屏幕刷新。
3 系统测试与应用
经测试,该系统在最高脉冲频率为200 kHz的运动控制芯片驱动下能够正常显示各轴脉冲的比例关系和相应的频率值,并能准确地描绘出如直线、简单曲线和基本弧形等加工轨迹。图示仪的最大响应延时约为30 ms,基本上能满足设计要求。
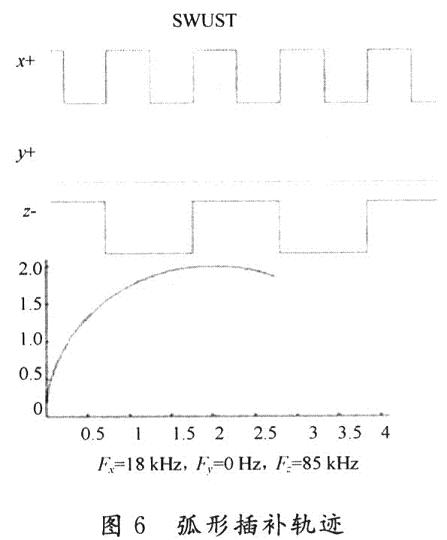
图6是驱动器最高脉冲频率为20 kHz下加工弧形时绘制的图形。图中弧形约占5π/8,横轴和纵轴的速度比约为2:1。在驱动器允许范围内,频率表与速度成正比,即频率比也约为2:1。图中测试值基本符合理论值。
4 结 论
在此着重介绍了基于ARM的运动轨迹数字图示仪的设计,分别从硬件设计和软件设计两个方面描述了系统的实现方法。它通过较低的成本,解决了数控研究和教学过程中分析插补算法、插补脉冲和刀具运动轨迹三者间关系的困难问题,在教学实用性上效果明显。
3 系统测试与应用
经测试,该系统在最高脉冲频率为200 kHz的运动控制芯片驱动下能够正常显示各轴脉冲的比例关系和相应的频率值,并能准确地描绘出如直线、简单曲线和基本弧形等加工轨迹。图示仪的最大响应延时约为30 ms,基本上能满足设计要求。
图6是驱动器最高脉冲频率为20 kHz下加工弧形时绘制的图形。图中弧形约占5π/8,横轴和纵轴的速度比约为2:1。在驱动器允许范围内,频率表与速度成正比,即频率比也约为2:1。图中测试值基本符合理论值。
4 结 论
在此着重介绍了基于ARM的运动轨迹数字图示仪的设计,分别从硬件设计和软件设计两个方面描述了系统的实现方法。它通过较低的成本,解决了数控研究和教学过程中分析插补算法、插补脉冲和刀具运动轨迹三者间关系的困难问题,在教学实用性上效果明显。
数控算法 ARM 图示仪 ARM7 LPC2136 NXP公司 相关文章:
- 基于ARM的除法运算优化策略(01-14)
- 基于ARM的CAN总线智能节点的设计(01-24)
- ARM基础知识教程五 (02-08)
- ARM基础知识教程六(02-08)
- ARM基础知识教程七(02-08)
- ARM基础知识教程八(02-08)