使用仿真和虚拟化的嵌入式设计
时间:09-06
来源:
点击:
虚拟化通过提供灵活性、便捷性以及增强的IT基础设施鲁棒性,为IT带来了巨大的变革。与物理目标硬件相比,虚拟化为那些面向普通计算机的软件开发人员带来了更大的帮助,其中包括下列功能:
轻松地管理多种虚拟机配置(不同的OS版本、不同的内存容量等)。
在这些不同配置上测试/调试自己的软件。
在相互隔离的环境中进行测试/调试,不必担心自己的工作站会崩溃。
不过,软件开发社区的其他人员--那些开发运行在嵌入式设备、非PC/工作站/普通计算机、非x86架构上的软件的开发人员,那些试图去维护过时硬件上的旧版应用程序或运行在供应不足或尚未面世的硬件上的应用程序的开发人员--是否能从中受益呢?
全系统仿真
全系统仿真为这些开发人员甚至非PC硬件配置提供了虚拟化功能。顾名思义,全系统仿真提供了对整个系统进行仿真的能力,其中包括其微处理器、内存、I/O外设、磁盘驱动器、网络连接等。
不过,与其将全系统仿真看作是设备的集合,不如将其看作是最终系统,例如,新型飞机上的航空电子设备机架、通信基站、网络设备、汽车或工业发动机控制器、人造卫星或高端计算服务器。
功能
与实际硬件相比,虚拟系统提供了更多的调试功能,这是因为它具有以下特性:逆向执行、保存和重新加载完整系统状态的功能以及窥视并控制虚拟系统设备的功能。这就为软件工程师的调试和测试工作额外提供了一个维度。与只能查看微处理器的寄存器和程序计数器状态的普通调试所不同的是,全系统仿真提供了查看在所有系统设备中所发生事件的功能。
例如,在调试UART驱动的问题时,可以为处理器所看不到的UART自身的特定条件设置断点。开发人员甚至能够改变这些设备的状态,从而在系统中加入虚拟硬件故障,以便测试软件如何发现硬件故障并从中恢复。
全系统仿真帮助软件开发人员进行系统级调试,而不是单板级调试。很多工程师可能都做过以下一些尝试:
调试在多板系统启动时间歇性出现,且看似与电路板之间细微的时间变化有关的问题。
在完全相同的时间同时停止系统的所有电路板,以便调试出现在电路板C但很可能起源于电路板A的问题。
调试看似发生在内部SoC I/O外设的设备驱动中的软件问题,却发现不能完全看到SoC内部实际发生的事件。
要求
全系统仿真支持处理所有上述情况。它可以成为非常难的软件和系统问题的一种强大的解决方案。但是,要使得全系统仿真成为现实,必须遵循一些重要的原则:
● 无论整套系统多么复杂,这种仿真需要快到足以运行完整的软件加载。
● 这种仿真必须可升级。如果不能仿真整套系统(无论是5块、10块还是100块电路板),那么它的作用就很有限。
● 仿真环境必须支持一套大型开箱即用的模型库,并同时向用户提供为自己的目标系统快速创建模型的方法。
● 仿真环境需要提供整个仿真系统的控制和可见性。
Virtutech公司的Simics就是仿真系统的一个例子,这是一款支持上述原则的全系统仿真器。设计人员可以运行完整系统的仿真,有时会包含具有异质目标架构的数百块不同的电路板。
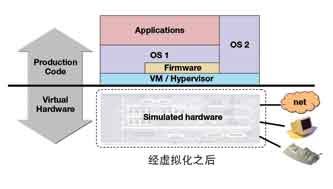
目标应用程序代码、实时操作系统、驱动和固件都可以使用虚拟化的目标硬件进行调试、测试和执行。虚拟化的软件开发环境可以运行的二进制代码,与实际目标上所运行的二进制代码完全相同。这就是说,不再需要RTOS/OS API抽象层,stubbed-out驱动或固件,或者在生产环境和stubbed-out环境中使用不同软件编译方法的多编译脚本。
虚拟化的软件开发环境提供了:
● 适用于目标硬件中微处理器的指令集仿真器。
● 目标硬件中与目标软件进行交互的所有设备的行为仿真。
● 仿真目标和现实世界内部及二者之间的连接(例如,诸如以太网、MIL-STD-1553、ARINC 429、SpaceWire、Firewire、USB、ATM等网络以及磁盘镜像、内存镜像等其他机制。)。
● 使用与软件开发人员与实际硬件交互时相同的工具(如编译器、链接器、调试器、IDE和RTOS)和方法的能力。
轻松地管理多种虚拟机配置(不同的OS版本、不同的内存容量等)。
在这些不同配置上测试/调试自己的软件。
在相互隔离的环境中进行测试/调试,不必担心自己的工作站会崩溃。
不过,软件开发社区的其他人员--那些开发运行在嵌入式设备、非PC/工作站/普通计算机、非x86架构上的软件的开发人员,那些试图去维护过时硬件上的旧版应用程序或运行在供应不足或尚未面世的硬件上的应用程序的开发人员--是否能从中受益呢?
全系统仿真
全系统仿真为这些开发人员甚至非PC硬件配置提供了虚拟化功能。顾名思义,全系统仿真提供了对整个系统进行仿真的能力,其中包括其微处理器、内存、I/O外设、磁盘驱动器、网络连接等。
不过,与其将全系统仿真看作是设备的集合,不如将其看作是最终系统,例如,新型飞机上的航空电子设备机架、通信基站、网络设备、汽车或工业发动机控制器、人造卫星或高端计算服务器。
功能
与实际硬件相比,虚拟系统提供了更多的调试功能,这是因为它具有以下特性:逆向执行、保存和重新加载完整系统状态的功能以及窥视并控制虚拟系统设备的功能。这就为软件工程师的调试和测试工作额外提供了一个维度。与只能查看微处理器的寄存器和程序计数器状态的普通调试所不同的是,全系统仿真提供了查看在所有系统设备中所发生事件的功能。
例如,在调试UART驱动的问题时,可以为处理器所看不到的UART自身的特定条件设置断点。开发人员甚至能够改变这些设备的状态,从而在系统中加入虚拟硬件故障,以便测试软件如何发现硬件故障并从中恢复。
全系统仿真帮助软件开发人员进行系统级调试,而不是单板级调试。很多工程师可能都做过以下一些尝试:
调试在多板系统启动时间歇性出现,且看似与电路板之间细微的时间变化有关的问题。
在完全相同的时间同时停止系统的所有电路板,以便调试出现在电路板C但很可能起源于电路板A的问题。
调试看似发生在内部SoC I/O外设的设备驱动中的软件问题,却发现不能完全看到SoC内部实际发生的事件。
要求
全系统仿真支持处理所有上述情况。它可以成为非常难的软件和系统问题的一种强大的解决方案。但是,要使得全系统仿真成为现实,必须遵循一些重要的原则:
● 无论整套系统多么复杂,这种仿真需要快到足以运行完整的软件加载。
● 这种仿真必须可升级。如果不能仿真整套系统(无论是5块、10块还是100块电路板),那么它的作用就很有限。
● 仿真环境必须支持一套大型开箱即用的模型库,并同时向用户提供为自己的目标系统快速创建模型的方法。
● 仿真环境需要提供整个仿真系统的控制和可见性。
Virtutech公司的Simics就是仿真系统的一个例子,这是一款支持上述原则的全系统仿真器。设计人员可以运行完整系统的仿真,有时会包含具有异质目标架构的数百块不同的电路板。
目标应用程序代码、实时操作系统、驱动和固件都可以使用虚拟化的目标硬件进行调试、测试和执行。虚拟化的软件开发环境可以运行的二进制代码,与实际目标上所运行的二进制代码完全相同。这就是说,不再需要RTOS/OS API抽象层,stubbed-out驱动或固件,或者在生产环境和stubbed-out环境中使用不同软件编译方法的多编译脚本。
虚拟化的软件开发环境提供了:
● 适用于目标硬件中微处理器的指令集仿真器。
● 目标硬件中与目标软件进行交互的所有设备的行为仿真。
● 仿真目标和现实世界内部及二者之间的连接(例如,诸如以太网、MIL-STD-1553、ARINC 429、SpaceWire、Firewire、USB、ATM等网络以及磁盘镜像、内存镜像等其他机制。)。
● 使用与软件开发人员与实际硬件交互时相同的工具(如编译器、链接器、调试器、IDE和RTOS)和方法的能力。
- 扩大ARM SoC的验证覆盖缩短仿真时间(07-20)
- Proteus在单片机系统设计中的应用(04-21)
- 仿真扩展芯片(EEC)简化高速汽车嵌入式处理器的集成(06-03)
- PIC单片机的应用设计技巧(07-03)
- DDS流水线结构的改进(07-31)
- AEMB软核处理器的SoC系统验证平台(10-05)