基于Small RTOS51的多任务串行通信研究
时间:06-13
来源:作者:北京跟踪与通信技术研究所 邵富杰 安徽大学 杨磊
点击:
2.2 任务间的通信与同步
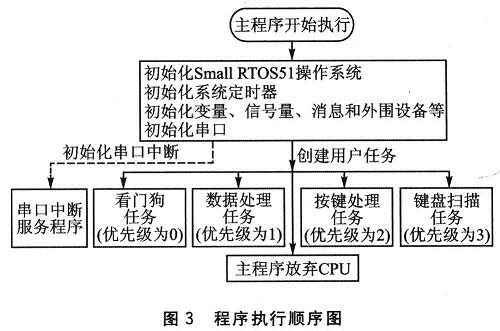
应用中,串口中断服务程序与数据处理任务之间、键盘扫描任务与按键处理任务之间都需要进行同步和通信,前者使用信号量进行同步和通信,后者使用消息。
串口中断服务程序接收到一个完整的数据包后,发送一个信号量给数据处理任务,因等待信号量而处于挂起状态的数据处理任务获得信号量后,立即从用户自定义的接收缓冲队列取出数据包进行处理。键盘扫描任务检测到按键被按下时,进行去抖动处理并获取键值。然后,以键值作为消息内容,发送消息给按键处理任务。因等待消息而挂起的按键处理任务取得消息后,根据消息内容(键值)和当前系统状态,生成一串命令数据并通过串口向远端发送。
结 语
本文举例说明了Small RTOS51环境下包含多任务的串行通信,重点叙述了多任务的执行过程和任务间的同步与通信。该应用系统经过较长时问的测试,没有发生数据到达串口时因没能及时处理而被后来到达的数据覆盖而造成丢失的情况,也没有发生按下按键时不能及时处理的情况,应用系统的可靠性和实时性要求均可满足。
Small RTOS51是一个占用系统资源极小的嵌入式实时操作系统,可以应用在绝大多数单片机上,而且移植过程简单。使用它开发基于单片机的多任务应用系统,可以较大地缩短开发周期。
Small RTOS51 多任务 串行通信 P89V51RD2 相关文章:
- 一种基于C51的多任务机制及应用(02-26)
- 嵌入式微处理器ARM7202触摸屏接口设计(08-07)
- 基于ARM的人体生理参数监护系统的设计(11-28)
- 单片机与PC机串行通信的实现方法 (02-25)
- 在VC++中用ActiveX控件实现与单片机的串行通信(07-31)
- I2C总线多主通信研究与软件设计(07-05)