寻迹小车中分布式控制系统的设计
时间:03-22
来源:综合电子论坛
点击:
软件设计
系统中各个ECU通过CAN总线发送接收命令,实现相互通信,从而实现数据的共享等。软件设计基于DAVE和KEIL软件编写,程序主要由CAN初始化、发送数据和接收数据三部分组成,如图5所示。
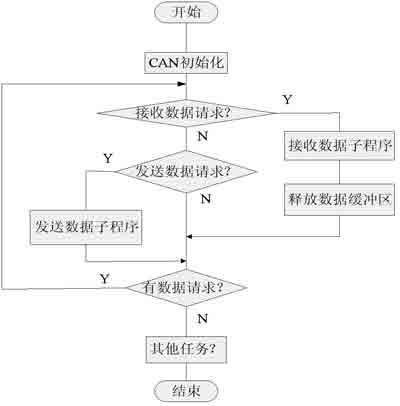
图5 主程序流程图
结论
本设计方案可实现分布式车身控制系统的基本功能,且结构简单、成本低。此外,这一设计思想同样也适用于真车的控制。汽车电子技术的不断进步,将促使CAN、LIN和正在发展的更高速、具有容错性的总线技术有机组合,构成安全、舒适,更满足人们需求的汽车网络。
系统中各个ECU通过CAN总线发送接收命令,实现相互通信,从而实现数据的共享等。软件设计基于DAVE和KEIL软件编写,程序主要由CAN初始化、发送数据和接收数据三部分组成,如图5所示。
图5 主程序流程图
结论
本设计方案可实现分布式车身控制系统的基本功能,且结构简单、成本低。此外,这一设计思想同样也适用于真车的控制。汽车电子技术的不断进步,将促使CAN、LIN和正在发展的更高速、具有容错性的总线技术有机组合,构成安全、舒适,更满足人们需求的汽车网络。
寻迹小车 CAN 分布式控制 PWM XC164CS 相关文章:
- 基于MSP430系列单片机的CAN总线接口转换卡设计(01-17)
- CAN总线—PROFIBUS-DP总线网关的实现方法(01-17)
- 汽车CAN总线(01-21)
- CAN总线控制器与DSP的接口(01-21)
- 基于ARM的CAN总线智能节点的设计(01-24)
- USB-CAN-RS232总线转换电路设计及实现(02-13)