利用一个ARM7处理器对无刷电机实施磁场定向控制
电机驱动能效不论提高多少,都会节省大量的电能,这就是市场对先进的电机控制算法的兴趣日浓的部分原因。三相无刷电机主要指是交流感应异步电机和永磁同步电机。这些电机以能效高、可靠性高、维护成本低、产品成本低和静音工作而著称。感应电机已在水泵或风扇等工业应用中得到广泛应用,并正在与永磁同步电机一起充斥家电、空调、汽车或伺服驱动器等市场。推动三相无刷电机发展的主要原因有:电子元器件的价格降低,实现复杂的控制策略以克服本身较差的动态性能成为可能。
以异步电机为例。简单的设计需要给定子施加三个120°相移的正弦波电压,这些绕组的排列方式能够产生一种旋转磁通量。利用变压器效应,这个磁通量在转子笼内感应出一股电流,然后产生转子磁通量。就是这两种磁通量相互作用产生电磁力矩,使电机旋转。
在转子上感应出电流的条件是,确保转子的转速与定子的磁通量频率不同;如果相同,转子只经历一个恒定的磁通量,不会有感应电流产生(楞次定律)。通电频率和其产生的机械频率之间的微小差异是异步电机命名的原因。一个三相交流电机实现转速可调操作的最简单方式是,实现一个所谓的电压/频率控制(或者叫做标量控制),其工作原理
是在频率与电机通电电压之间保持恒比。这种方法产生一个恒定的定子磁通量,然后在转子主轴上得到额定的电机力矩。对于应用负载特性被大家了解的低成本驱动器,以及控制带宽要求不是很高的驱动器,如数量很少的HP泵和风扇、洗衣机等,这是一个很受欢迎的控制方法。一个MIPS不是很高并带有合理的外设接口的8位单片机如ST7MC,即可满足这种应用需求,同时编程也很简单。
这种方法无法在瞬间工作过程中保证最佳的电机特性(力矩、能效)。而且为防止电机出现临时消磁现象,还必须限制驱动器反作用力的时间。为了克服这些限制条件,考虑到电机的动态特性,市场上出现了其他的控制策略。磁场定向控制(也称矢量控制)是应用最广泛的控制算法,目标应用包括带式传输机、大功率水泵、汽车废气排放、工厂自动化。这种方法允许用两个去耦的控制变量(下文简称Id和Iq)控制一个交流电机,就像控制分开励磁的直流电机一样。励磁电流Id产生直流主磁通量,而Iq则控制力矩,功能与直流电机中的电枢电流一样。当负载发生变化时,磁场定向控制能够对转速进行精确的控制,响应速度非常快,甚至在瞬间操作过程中,通过使定子和转子的磁通量保持正交,可以优化电机能效。这种方法可实现位置控制方案(通过瞬间力矩控制),在低速运转时释放电机的全部力矩。
下面简要介绍一下磁场定向控制的工作原理。把参考坐标系从固定的定子线圈换到运动的转子磁通量坐标系,采用两个著名的变换运算法则:Clarke变换和Park变换。Clarke变换是将120°相移三轴坐标系(Ia, Ib, Ic)转换成两轴直角坐标系(Ia, Ib);Park变换是将固定的 (Ia, Ib)坐标系统转换成与转子相关的两轴旋转坐标系(Id, Iq)。最后这两个数值是直流或者变化缓慢的数值,采用简单的PI控制器方法可以调整这两个数值。最后,利用逆变换(Park和Clarke逆变换)将其还原到固定的AC三相坐标系,如图1所示。
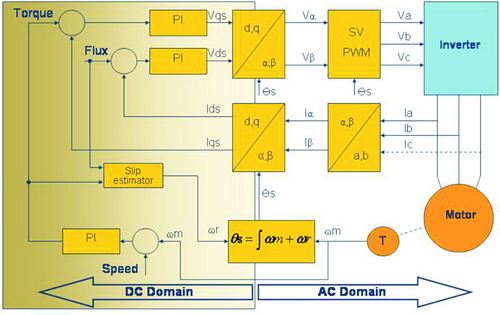
图1 磁场定向控制的工作原理
在各种矢量控制方法中,我们采用一个间接磁场定向控制方法,唯一测量和处理的电机模型参数是转子时间常数Lr/Rr(在转差估算器模块内)。如果电机是一个永磁同步电机,结构框图和相应的功能将会非常相似,不再需要转差估算器,磁通量命令可以设定为零(磁铁自己产生磁通量)。算法只是这项工作的一部分:只要计算出电压电平,就必须将其转换成伏特和安培。像在任何一个现代功率电子系统一样,这个电机控制系统由肌肉(功率转换器)和大脑(单片机)组成。驱动功率转换器(俗称逆变器)是由三个PWM输出驱动。从图2中不难看出,一个功率强大的三路缓冲器将一个0-5V的逻辑信号,转变成一个0-300V的方波信号,施加到电机端子上。电机的绕组电感起到一个低通滤波器的作用:去除载波频率,平滑电流变化,形成一个正弦电流波形,即PWM调制的波形。
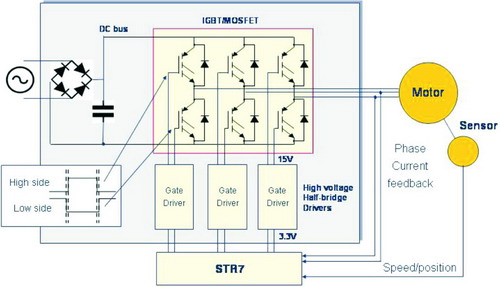
图2 电机控制系统
让我们从CPU开始逐个查看一个先进的电机驱动器系统的整体需求。整个矢量控制算法必须连续反复计算,计算速度在1~10 kHz之间(1ms一直到100μs闭环时间,视最终应用的带宽而定)。系统需要大量的数学计算(三角函数、PID调整器、实时磁通量和基于电机参数的力矩估算)。此外,必须给应用的其余部分(通信、用户界面等)的计算留有余地。为了不限制动态
- 史上最经典电动自行车控制器设计方案(08-22)
- 基于ARM的除法运算优化策略(01-14)
- 基于ARM的CAN总线智能节点的设计(01-24)
- ARM基础知识教程五 (02-08)
- ARM基础知识教程六(02-08)
- ARM基础知识教程七(02-08)