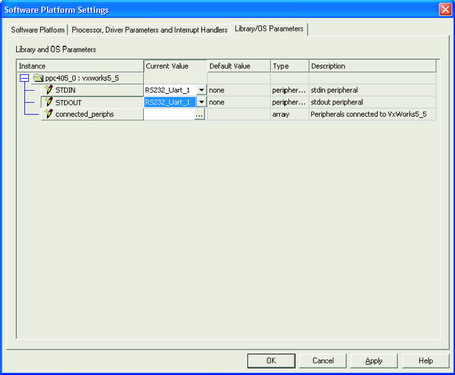
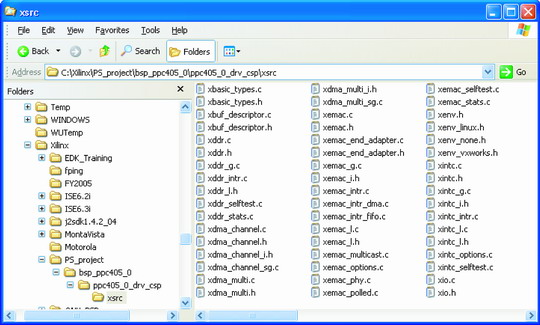
 图 5 – Tornado 2.x 项目:VxWorks 标签 基于 FPGA 的嵌入系统之动态特性是造成此微小差别的原因。因为基于 FPGA 的嵌入系统可以用新的或更改后的 IP 重新编程,设备驱动程序可以改变,因此就需要对设备驱动程序源文件进行更为动态的放置。表 4 为自动生成的 BSP 的目录树。Xilinx 设备驱动程序放置在 BSP 子目录 ppc405_0_drv_csp/xsrc 中。
Xilinx 设备驱动程序在 C 盘中执行并分布在数个源文件中,这点不同于传统的、通常由单个 C header 和执行文件组成的 VxWorks 驱动程序。此外,对于设备驱动程序,既有独立于操作系统的执行,又有可选的依赖于操作系统的执行。
驱动程序的操作系统独立部分应同任何操作系统或处理器一起使用。它提供了一种应用程序接口 (API),能提取基础硬件的功能。驱动程序的操作系统附属部分对驱动程序进行调整,使其得以在 VxWorks 之类的操作系统下使用。例子有串行端口使用的 Serial IO 驱动程序和以太网控制器使用的 END 驱动程序。只有能被紧密集成到标准操作系统接口的驱动程序才要求操作系统附属驱动程序。
Xilinx 驱动程序源文件加入 VxWorks 映像构件的方式同其他 BSP 文件加入的方式相同。针对每个驱动程序,在 BSP 目录中都有一个名为 ppc405_0_drv_<driver_version>.c 的文件。此文件包括针对给定设备的驱动程序源文件 (*.c),并自动由 BSP makefile 编译。
该过程与 VxWorks sysLib.c 针对 Wind River-supplied 驱动程序纳入源文件的过程相似。Xilinx 驱动程序文件不像其余驱动程序一样单纯纳入 sysLib.c 的原因,在于命名空间的冲突和可维护性问题。如果所有的 Xilinx 驱动程序文件都是单个编译单元的一部分,那么静态功能和数据就不再处于保密状态了。这会对设备驱动程序产生限制,也会抵消其操作系统独立性。
|