ARM/DSP˫��ϵͳ��ͨ�Žӿ����
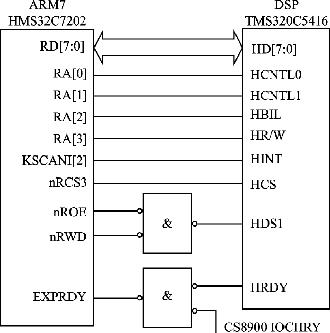
ͼ3. DSP������˫��ͨ��
�������õ�ַ��RA/[3:0/]����HPI��������Ŀ����źš�A0��A1�������ʼĴ������͡�A2�������ʵ��ǵ�һ���ֽڻ��ǵڶ����ֽڣ�A2��0ʱ����ʾд�������Ϊ��һ���ֽڣ�A2��1ʱ����ʾд�������Ϊ�ڶ����ֽڡ���HPI��8�����е�ַ�ߺͿ���������HDS1��HDS2���½��ز�������������HR/W���������HR/Wͨ����ַ��A3��ʾ��ǰ�����Ƕ�����д�������������ź���nRCS3��nRW0�����ͬ������KSCAN[2]����ΪHMS30C7202��PORTA�ж�����ţ�DSPͨ���жϷ�ʽ��Linux�ײ�HPI��������ͨ�š�
3 ARM��DSP��ͨ�Žӿ������������
����Linux��Unix����ϵͳ��һ�ֱ��֡���Linux�±�д���������ԭ����˼����ȫ������������Unixϵͳ��������DOS��Window�����µ����������кܴ������Linux����������Ա�����ںˣ�Ҳ����ģ����ʽ��̬�ؼ����ж�ء�Linux�������ص�ɸ���Ŀ��ϵͳ�ü��ںˣ����ʺ���Ƕ��ʽϵͳ��
��1�� Linux�����������ԭ��
������Linux�������豸��Ϊ�ַ��豸�����豸�������豸���֣������豸��������ͨ�ļ�����˿���ͨ���ò�����ͨ�ļ���ͬ��ϵͳ���������رա���ȡ��д���豸��ϵͳ��ÿ���豸����һ���豸�����ļ�����ʾ��
������Linux�У��豸����������һ����غ����ļ��ϡ��������豸�����ӳ�����жϴ�������ÿ���豸�����ӳ���ֻ����һ���豸���߽�����ص��豸����Ŀ�ľ��Ǵ����豸�ص������н��ܳ�������ִ�С���ִ��һ������ʱ����������Ǹ��ݿ��������������ṩ�Ľӿڣ��������жϻ���ȥ�����жϷ����ӳ�������豸�������������豸�������ýṹfile_operations���ļ�ϵͳ��ϵ��������Linux����������װ����ͼ4��ʾ��
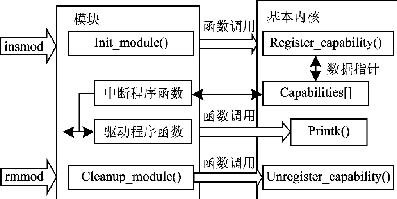
ͼ4.ģ�����ӵ��ں�ʾ��
��2�� HPI��������
����HPI�ӿڿ���I/O�˿ڷ�ʽ,Ҳ������I/O��ȡ��ʽ��ϵͳƽ̨����I/O��ȡ��ʽ����HPI���ʿ��ƼĴ��������ݼĴ�������ַ�Ĵ�����ӳ�䵽�ڴ�������ַΪ0X0C000000��ʼ�Ŀռ䣬ͨ�����ʴ洢��ָ���HPI���в�����HPI����������ַ�������£�
#defineHPI_BASE0X0C000000//HPI����ַ
#define HPD_READ_LOWHPI_BASE+0X0012
//�����ݼĴ�����һ�ֽ�
��
#define HPA_WRITE_HIGHHPI_BASE+0X000C
//д��ַ�Ĵ����ڶ��ֽ�
������Linux�£�����Windows��������ֱ�ӷ���������ַ���豸�����������ں˵�һ���֣������ں�����������һ���������ں�ģʽ������������������ͻ�ʹϵͳ�ܵ������ƻ��������Ҫ��������ַӳ�䵽�ں˿ռ䡣��Linux��ͨ��virtul_address=(u32)ioremap(HPI_BASE,HPI_LENGTH)ʵ�֡�����������Ҫ�ṹ���£�
struct file_operations hpi_fops={
owner:THIS_MODULE,
read: hpi_read,
write: hpi_write,
poll : hpi_poll,
open: hpi_open,
release: hpi_release,
};
����HPIͨ��Э�����֡�ṹ��������ǿ��HPI�ӿ���������DSP�ڲ�RAM���пռ䣬ϵͳͨ����DSP�ڲ�����2 K��(16λ)��Ϊ֡����������д��1 K�֣�Э�����һλ��������Э�顣֡��ʽ���1���С�

����
�������Ľ�����ʹ��ARM��DSP˫CPU���ɵ�˫��Ƕ��ʽϵͳ��Ӳ��ƽ̨���Լ�Դ���뿪�ŵ�Linux��ΪǶ��ʽϵͳ�в���ϵͳ�ķ�����������ϵͳ��Ƶ������ͼ����ϸ������ARM��DSPͨ�Žӿڵ���ơ���һ��Ʒ������������ڴ�����ִ�Ƕ��ʽϵͳ����ƣ���һ����ʵ�ü�ֵ��
�����������������������������������������
1 http://www.kernel.org
2 www.linuxdevices.com
3 http://kernelnewbies.org/documents/kdoc
4 Michacl K.Johnson Erik W.Troan. LINUX���Ȩ��ָ��. �����ǣ���������. �������й����������磬2001
5 ��ʢ��������. �����źŴ���������ʵ��. �Ϻ����Ϻ���ͨ��ѧ�����磬2003
6 �����裬��ʢ. �����źŴ���ϵͳ��Ӧ�ú����. �Ϻ����Ϻ���ͨ��ѧ�����磬2003
���ߣ�����ʦ����ѧ ���� ������
DSP ARM ˫��Ƕ��ʽϵͳ ͨ�Žӿ� ������£�
- F1aSh�洢����TMS320C3Xϵͳ�е�Ӧ��(11-11)
- ����PIC18Fϵ�е�Ƭ����Ƕ��ʽϵͳ���(11-19)
- DSP�����Dz�ضನ��ϵͳ�е�Ӧ��(01-25)
- ����PCI���ߵ�˫DSPϵͳ��WDM�����������(01-26)
- ����Virtex-5 FPGAʵ�ָ������ܵķ���(03-08)
- DSP�뵥Ƭ��ͨ�ŵĶ��ַ������(03-08)