DIY四轴飞行器制作过程(土豪路过,遍地黄金)
本人是航模菜鸟,大概是去年11月份,迷上了四轴飞行器,经常上MK的网站看飞行录相,四轴飞行起来稳定性真好,简直是酷毙了。最终没能抵制住诱惑,冲动之下决定自已也做个来玩玩。从网上收集资料,一切从0起步。经历了几个月的走走停停,现在已陆续完成了无刷电调、四轴机架、遥控器多通道改造、IMU模块、飞控板设计制作。现小有成果,公布出来和大家交流交流,以资进步
由于水平所限,本人只熟悉和使用51架构的MCU,系统的所有模块都是架构在C8051F的基础上。但四轴所涉及的原理、控制理论都是一样的原理,希望各位同好网友不吝赐教,多多指导,谢谢!
1.从旧货摊买的两个硬盘

2.费了九牛二虎之力,最后改造一个拆手机用的起子,搞定

下面接着来。机架打算用现有的电直尾管和管座配上硬盘片构成,电机用新西达2212 KV930,两正两反的桨用口碑不错的德国EPP1045 。
3.固定电直尾管的座子,好贵呀.

4.和到手的电机、尾管合张照

5.外加工的4个电机安装座

6.机体主要部分完成

7.加工机架的得力工具,桌面微型台钻

8.EPP1045

9.一正一反

为提高发帖效率,制作过程从略,一切用图片说话
10.和市场上3块钱一个的正桨对比

11.用电机原配的桨保护器固定两叶桨

12.焊上香蕉头,感觉重量不小,拆除前留个影

13.电机安装固定方式

14.机架整体结构

15.平视角度,很有型吧

16.整机完成效果图

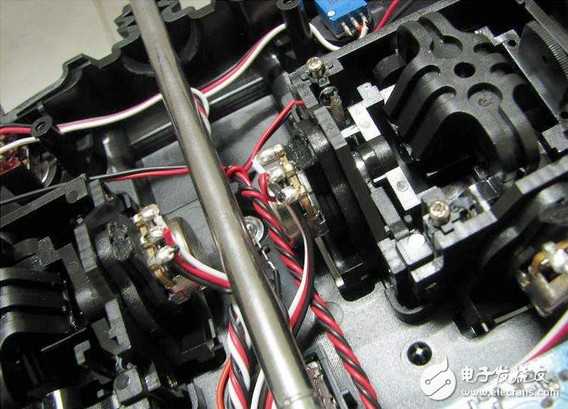
好了,机架完成了。接下来是遥控器的改造时间 , 买了个又便宜又大块的FT06-C, 准备先把6通改到8通,增加两个比例通道,并且配上LCD液晶屏,用来显示控的相关参数。控的高频头还留用,PPM编码板整个换掉它。
17.准备拿来折腾的天地飞6C控

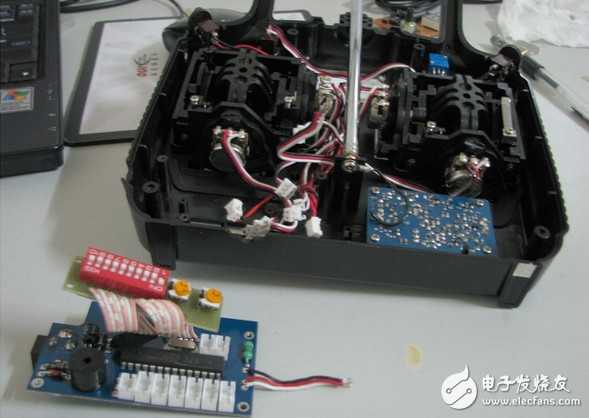
18.FT06-C内部结构

19.在这个位置加个LCD屏
20.打回来的样板,这样做省¥¥

21.为裁板专门买的勾刀

22.花了一个多小时时间,搞定!

23.拆掉FT06-C控的原装PPM板
24.比下位置,很正点
25.FT06-C的这个位置,刚好能放进一个5110屏

26.液晶屏的PCB板
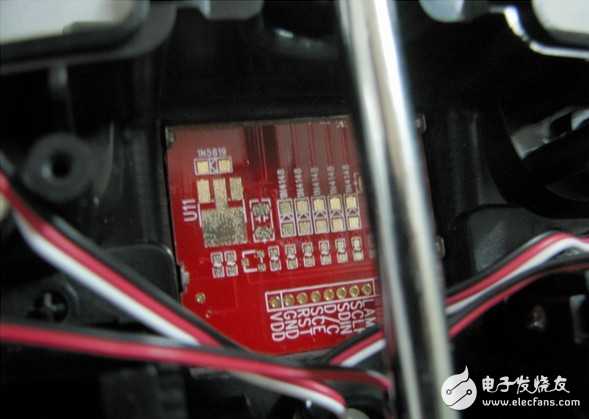
27.预期效果

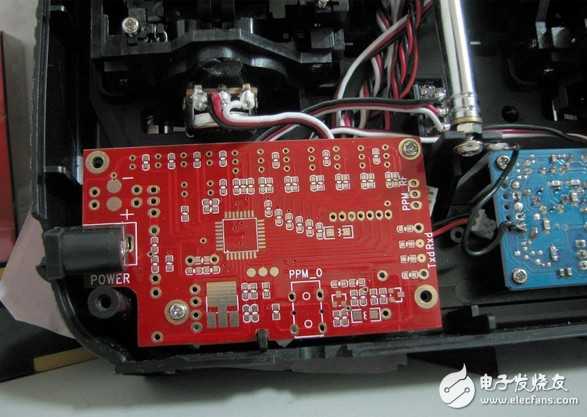
28.PPM控制板焊接完工

29.看背面。底部电源走线,被工厂做板时移错了位置

30.新到手的5110LCD屏

31.布线时未注意,搞反了液晶的方向

32.液晶屏点亮成功

33.效果怎样

34.安装右边电位器

35.右边

36.安装左边电位器

37.左边

38.液晶、电位器的连线
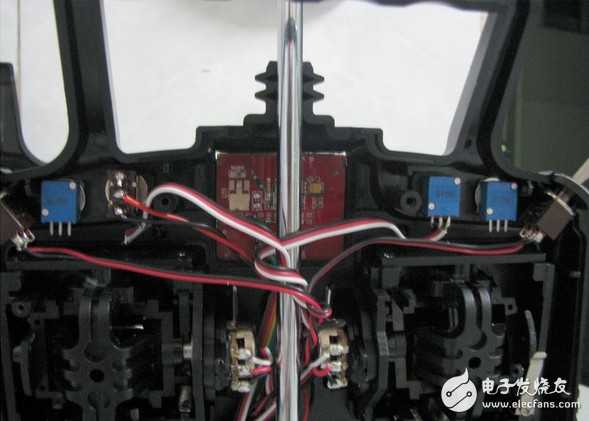
39.增加的两个电位器

40.旋钮安装好的样子

41.增加的电位器旋钮高度

42.工程模式,校准摇杆中立点

43.工作时,显示前6个通道的PPM有效值

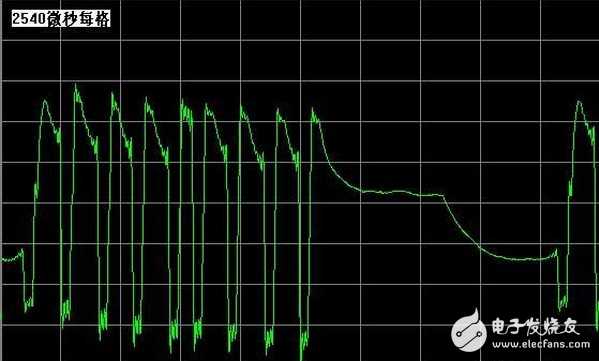
44.从接收机输出测得的8通道PPM波形
45.在G3.5中试飞测试

再来个控的最新图片,通道数到目前为止还是够用就好,没去动它。根据PPM的信号格式,最多是可以做到12个通道的,一般的应用也不需要这么多,等确定需要的时候,再说吧,控的改造先到这里了。
46.控的最新效果

这里再来一段小插曲,活跃下气氛 。前面发的机架,在制作过程中没有详细拍下图片,现在补上 ,发个我制作的第二套机架的详细图片,让大家看得更爽一点。01.买到两块旧硬盘
 03.IBM 40G
03.IBM 40G 04.看背面
04.看背面 材料基本都是采用现成的电直配件,电机的固定座得另外加工,这是在机加工店铺做回来的铝圆片,直径35mm 厚度2.5mm。只钻了电机固定的孔,要想固定到尾管上还得自已加工一下,钻出尾管夹的螺丝孔来。这些工作要靠我的得力助手-------桌面微型台钻来完成了:05.外加工的电机固定片,自已加工尾管夹螺丝孔
材料基本都是采用现成的电直配件,电机的固定座得另外加工,这是在机加工店铺做回来的铝圆片,直径35mm 厚度2.5mm。只钻了电机固定的孔,要想固定到尾管上还得自已加工一下,钻出尾管夹的螺丝孔来。这些工作要靠我的得力助手-------桌面微型台钻来完成了:05.外加工的电机固定片,自已加工尾管夹螺丝孔 06.把机架上已加工好的拆下来,做模本
06.把机架上已加工好的拆下来,做模本 07.在一面贴上强力双面胶
07.在一面贴上强力双面胶 08.和待加工的圆片重叠在一起
08.和待加工的圆片重叠在一起 09.保证完全重合
09.保证完全重合 10.钻出5.0mm的孔
10.钻出5.0mm的孔 11.再用6.2mm的钻头做一下孔的沉头效果,去除孔边缘的棱角
11.再用6.2mm的钻头做一下孔的沉头效果,去除孔边缘的棱角 12.电机穿线孔完成
12.电机穿线孔完成 13.开始钻尾管夹螺丝孔
13.开始钻尾管夹螺丝孔 14.全部完成
14.全部完成 15.背面
15.背面 好了,电机固定片做完。下面该加工硬盘片了,用已做好的机架上硬盘片做模具,把盘片用双面胶粘在一起尽量重合,然后用台钻开螺孔。这次买硬盘时没注意,买到了传说中的IBM玻璃盘 ,表面看起来和铝盘片一样,钻孔时才发现不对劲,压下钻头时居然钻不下去,一使劲,盘片碎了,拿起来一看:玻璃盘 ,My god!16.加工硬盘片时,出现了意外。竟然买到了传说中的IBM玻璃盘
好了,电机固定片做完。下面该加工硬盘片了,用已做好的机架上硬盘片做模具,把盘片用双面胶粘在一起尽量重合,然后用台钻开螺孔。这次买硬盘时没注意,买到了传说中的IBM玻璃盘 ,表面看起来和铝盘片一样,钻孔时才发现不对劲,压下钻头时居然钻不下去,一使劲,盘片碎了,拿起来一看:玻璃盘 ,My god!16.加工硬盘片时,出现了意外。竟然买到了传说中的IBM玻璃盘 17.碎掉一大块。算了,先放一边
17.碎掉一大块。算了,先放一边 18.早上刚到的电直配件
18.早上刚到的电直配件 19.电机固定座安装完成的样子
19.电机固定座安装完成的样子 20.旁边的是450电直脚架
20.旁边的是450电直脚架 21.电机固定座正面
21.电机固定座正面 22.近点看看
22.近点看看 23.觉得不过瘾的话,再来个侧面
23.觉得不过瘾的话,再来个侧面
 24.背面尾管夹的固定情况
24.背面尾管夹的固定情况 25.换个角度
25.换个角度 26.用另一机架上的硬盘片装上,看看效果先
26.用另一机架上的硬盘片装上,看看效果先 27.用原机架的硬盘片把新机架装起来,看下效果先
27.用原机架的硬盘片把新机架装起来,看下效果先 28.四轴的“机头”
28.四轴的“机头” 29
29 30.
30. 31.仰视
31.仰视 32.俯视。整体工作已完成,现在只差硬盘片了
32.俯视。整体工作已完成,现在只差硬盘片了 没办法还得去一次电子市场。又买回两块旧硬盘,不管三七二十一赶快拆开看看,松了口气,这回是铝盘片。33.中午火速赶到华强北,买回3个硬盘
没办法还得去一次电子市场。又买回两块旧硬盘,不管三七二十一赶快拆开看看,松了口气,这回是铝盘片。33.中午火速赶到华强北,买回3个硬盘 34.几乎8、9成新,看成色还能用,都是40G
34.几乎8、9成新,看成色还能用,都是40G 35.不管三七二十一,拆开看看再说
35.不管三七二十一,拆开看看再说 36.都是单体盘片的
36.都是单体盘片的 37.盘片拆出来了,这回的是铝盘
37.盘片拆出来了,这回的是铝盘 38.做废的IBM玻璃盘
38.做废的IBM玻璃盘 39.开工
39.开工 40.贴上双面胶
40.贴上双面胶 41.把盘片重叠放好42.再放第二张盘片
41.把盘片重叠放好42.再放第二张盘片 43.加工好的成品
43.加工好的成品 44.钻孔边缘都做了沉头处理
44.钻孔边缘都做了沉头处理
推荐一个51单片机做的四轴飞行器,目前正在众筹,价格很低哇http://z.elecfans.com/21.html 适合入门
45.尾管按长度裁好,开出定位孔
46.组装完成

新机架完工了,摆几个pose来show show
47.这次买的脚架有点长,看起来很般配而且是银色

48..JPG

49..JPG

50..JPG

51..JPG

52..JPG

53.机架翼展610mm,电机轴-轴距580mm左右。

54.看肚皮.JPG

55.JPG

56..JPG
57.太有成就感了^_^

到此为止,新机架制作跑题完毕。
要想用遥控来操控四轴飞行器,接收机还得进行下改造,引出接收机内的PPM综合信号,方便四轴的飞控板进行通道采集。接收机的原通道输出口留着不用。我是把PPM综合信号从第6通道插口上引出的,这样用条舵机延长线插到第6通道上就行了,很方便。/*****************************************************************///
1.6通道接收机
 3.接收板正面
3.接收板正面 4.背面,用的 31136G
4.背面,用的 31136G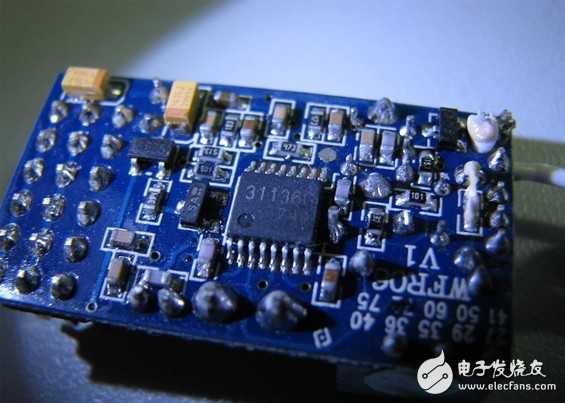 5.天线输入端的加感线圈(小电感),可减短天线的长度
5.天线输入端的加感线圈(小电感),可减短天线的长度 6.插针边是6通道PWM的输出隔离电阻,PPM信号在逻辑转换芯片VHC164的1、2两脚
6.插针边是6通道PWM的输出隔离电阻,PPM信号在逻辑转换芯片VHC164的1、2两脚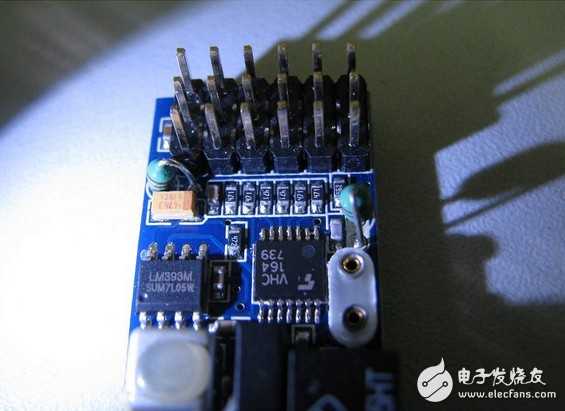 7.PPM信号从接收机第6通道引出,把输出隔离电阻焊起来
7.PPM信号从接收机第6通道引出,把输出隔离电阻焊起来 8.焊接完成。为安全起见烙铁断电焊接
8.焊接完成。为安全起见烙铁断电焊接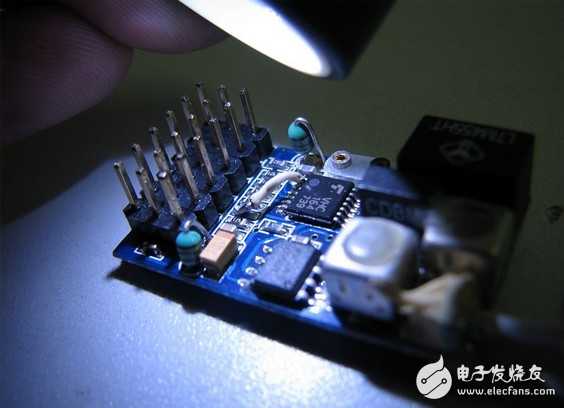 9.换个角度
9.换个角度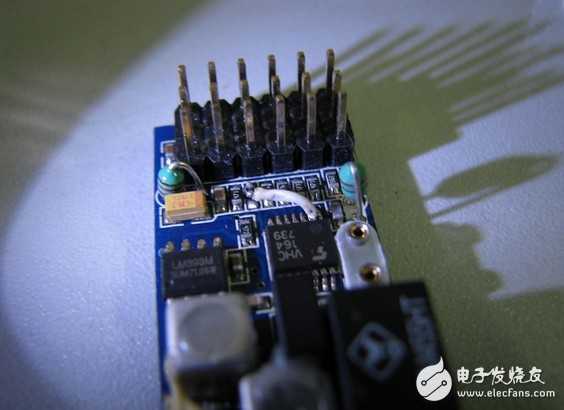 10.拿万用表测已连通
10.拿万用表测已连通 11.跟随我多年的老功臣:4位半DT930F+
11.跟随我多年的老功臣:4位半DT930F+ 到这里为止,四轴飞行器的机架和遥控相关图片已贴完了,马马虎虎做了一点图片解说。机械结构对各位在座坛友达人来说,很容易看懂,我也就不多费口舌了 。 眼下四轴飞行器机架和外围相关设备改造已大功告成,接下来到四轴的灵魂部分---飞控+电调了。为什么电调也算是四轴的灵魂部分呢?因为四轴要用的电调,还是有所不同的。各看官稍安勿躁,且听我慢慢道来。 先说飞控的核心组成和大概原理,四轴飞行器相对于常规航模来说,最最复杂的就是电子部分了。之所以能飞行得很稳定,全拜电子控制部分的功劳。在常规固定翼飞机上,陀螺仪并非常用器件,在相对操控难度大点的直机上,如果不做自动稳定系统,也只是锁尾才用到陀螺仪。四轴飞行器与其不同的地方是必须配备陀螺仪,这是最基本要求,不然无法飞行,更谈不上飞稳了。不但要有,还得是3轴向(X、Y、Z)都得有,这是四轴飞行器的机械结构、动力组成特性决定的。在此基础上再辅以3轴加速度传感器,这6个自由度,就组成了飞行姿态稳定的基本部分,也是关键核心部分---惯性导航模块,简称IMU。飞行中的姿态感测全靠这个IMU了,可见它是整架模型的核心部件。 再说说电调,四轴飞行器有四个桨(纯属费话:em15: ),两两相对呈十字交叉结构,在桨的转向上分正转和反转,这样可抵消模型自身的旋转。每个桨的直径很小,通常是10寸左右。四个桨转动时的离心力是分散的。不象直机的桨,只有一个能产生集中的离心力形成陀螺性质的惯性离心力,保持机身不容易很快的侧翻掉。所以通常用到的舵机控制信号更新频率很低。四轴为了能够快速反应,以应对姿态变化引起的飘移,需要高反应速度的电调,常规PPM电调的更新速度只有50Hz左右,满足不了这种控制所需要的速度,且PPM电调MCU内置PID稳速控制,能对常规航模提供顺滑的转速变化特性,用在四轴上就不合适了,四轴需要的是快速反应的电机转速变化。用高速专用电调,IIC总线接口传送控制信号,可达到每秒几百上千次的电机转速变化,在四轴飞行时,姿态时刻能够保持稳定。即使受到外力突然冲击,依旧安然无恙。 我是个行动派+实干派,文字描述能力欠佳,读书时的那点写作文的“天份”,早就还给老师了。还是用图片说话吧,这样来得直接点。 接下来是IIC高速电调,这个也是自已通过测试、不断完善才制作成功的。以前在另一个帖子有发过,一时找不到了。四轴飞行器的整机重量+3S锂聚电池通常在800g上下,悬停总电流最大不超过12A,分摊到每个电调上也就3~4A电流,考虑到可能出现的机身姿态大动态变化的情况,单个电调能提供25A的峰值电流已足够了。所以我做的电调只用了6个MOS管,测试过整机持续电流20A 工作20分钟,电调工作良好,这样的表现完全够四轴用了。再大的电流没条件测试了,我的直流电源只能提供到20A。 先贴几张实验时的电调板子图片。* 电调测试板,新西达2212A电机,KV930
到这里为止,四轴飞行器的机架和遥控相关图片已贴完了,马马虎虎做了一点图片解说。机械结构对各位在座坛友达人来说,很容易看懂,我也就不多费口舌了 。 眼下四轴飞行器机架和外围相关设备改造已大功告成,接下来到四轴的灵魂部分---飞控+电调了。为什么电调也算是四轴的灵魂部分呢?因为四轴要用的电调,还是有所不同的。各看官稍安勿躁,且听我慢慢道来。 先说飞控的核心组成和大概原理,四轴飞行器相对于常规航模来说,最最复杂的就是电子部分了。之所以能飞行得很稳定,全拜电子控制部分的功劳。在常规固定翼飞机上,陀螺仪并非常用器件,在相对操控难度大点的直机上,如果不做自动稳定系统,也只是锁尾才用到陀螺仪。四轴飞行器与其不同的地方是必须配备陀螺仪,这是最基本要求,不然无法飞行,更谈不上飞稳了。不但要有,还得是3轴向(X、Y、Z)都得有,这是四轴飞行器的机械结构、动力组成特性决定的。在此基础上再辅以3轴加速度传感器,这6个自由度,就组成了飞行姿态稳定的基本部分,也是关键核心部分---惯性导航模块,简称IMU。飞行中的姿态感测全靠这个IMU了,可见它是整架模型的核心部件。 再说说电调,四轴飞行器有四个桨(纯属费话:em15: ),两两相对呈十字交叉结构,在桨的转向上分正转和反转,这样可抵消模型自身的旋转。每个桨的直径很小,通常是10寸左右。四个桨转动时的离心力是分散的。不象直机的桨,只有一个能产生集中的离心力形成陀螺性质的惯性离心力,保持机身不容易很快的侧翻掉。所以通常用到的舵机控制信号更新频率很低。四轴为了能够快速反应,以应对姿态变化引起的飘移,需要高反应速度的电调,常规PPM电调的更新速度只有50Hz左右,满足不了这种控制所需要的速度,且PPM电调MCU内置PID稳速控制,能对常规航模提供顺滑的转速变化特性,用在四轴上就不合适了,四轴需要的是快速反应的电机转速变化。用高速专用电调,IIC总线接口传送控制信号,可达到每秒几百上千次的电机转速变化,在四轴飞行时,姿态时刻能够保持稳定。即使受到外力突然冲击,依旧安然无恙。 我是个行动派+实干派,文字描述能力欠佳,读书时的那点写作文的“天份”,早就还给老师了。还是用图片说话吧,这样来得直接点。 接下来是IIC高速电调,这个也是自已通过测试、不断完善才制作成功的。以前在另一个帖子有发过,一时找不到了。四轴飞行器的整机重量+3S锂聚电池通常在800g上下,悬停总电流最大不超过12A,分摊到每个电调上也就3~4A电流,考虑到可能出现的机身姿态大动态变化的情况,单个电调能提供25A的峰值电流已足够了。所以我做的电调只用了6个MOS管,测试过整机持续电流20A 工作20分钟,电调工作良好,这样的表现完全够四轴用了。再大的电流没条件测试了,我的直流电源只能提供到20A。 先贴几张实验时的电调板子图片。* 电调测试板,新西达2212A电机,KV930 * 全部使用N-MOS,TO-220封装
* 全部使用N-MOS,TO-220封装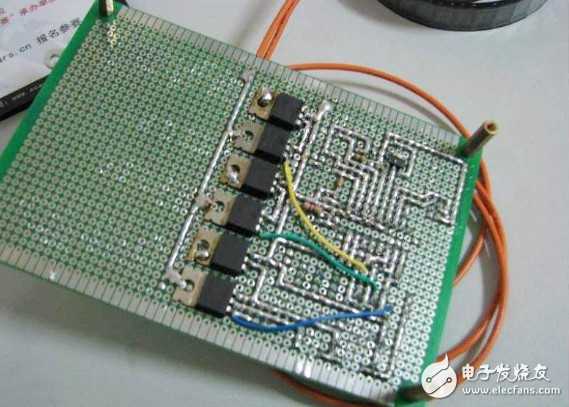 * 测试用的15V20A直流电源
* 测试用的15V20A直流电源 下面来真的了 ,打板子做的电调,用上了电调常用的高频电解电容,以前没接触过这些东西,不晓得还有高频电容这回事 电调板子上有条飞线,是用来测试的,正常使用中需拆除。 1.电调板焊完正面
下面来真的了 ,打板子做的电调,用上了电调常用的高频电解电容,以前没接触过这些东西,不晓得还有高频电容这回事 电调板子上有条飞线,是用来测试的,正常使用中需拆除。 1.电调板焊完正面 2.电调板反面
2.电调板反面 3.持续电流可达14A以上
3.持续电流可达14A以上 4.电调板焊完正面
4.电调板焊完正面 5.电调板反面
5.电调板反面 6.电调PCB,四块一套
6.电调PCB,四块一套 飞控板也已完工,该上上图片了。飞控板的核心就是IMU惯导模块,先贴IMU的吧。IMU由三轴陀螺仪和三轴加速度计协同组成,是整个飞控板乃至整架模型的核心,有了它才算具备飞行稳定的先天条件。为了飞行性能的提升和提高飞控实现的成功率,陀螺仪选用了MEMS工艺的LISY300AL,300度/秒感测量程,工作电压3V3,和飞控的CPU工作电压一致,用ADC采集陀螺仪的输出信号。加速度计是IIC接口的LIS3LV02DQ,每个感测轴都可设置轴滚动触发功能,用来感测飞行器姿态滚转,在飞行失控时可触发降落伞装置,使飞行器安全着陆。此功能做为备选项,暂放一边不管它,先从最简单的功能做起。限于个人能力,功能不急着搞得太多,以免目标太高对自已失去信心。7.IMU模块PCB尺寸
飞控板也已完工,该上上图片了。飞控板的核心就是IMU惯导模块,先贴IMU的吧。IMU由三轴陀螺仪和三轴加速度计协同组成,是整个飞控板乃至整架模型的核心,有了它才算具备飞行稳定的先天条件。为了飞行性能的提升和提高飞控实现的成功率,陀螺仪选用了MEMS工艺的LISY300AL,300度/秒感测量程,工作电压3V3,和飞控的CPU工作电压一致,用ADC采集陀螺仪的输出信号。加速度计是IIC接口的LIS3LV02DQ,每个感测轴都可设置轴滚动触发功能,用来感测飞行器姿态滚转,在飞行失控时可触发降落伞装置,使飞行器安全着陆。此功能做为备选项,暂放一边不管它,先从最简单的功能做起。限于个人能力,功能不急着搞得太多,以免目标太高对自已失去信心。7.IMU模块PCB尺寸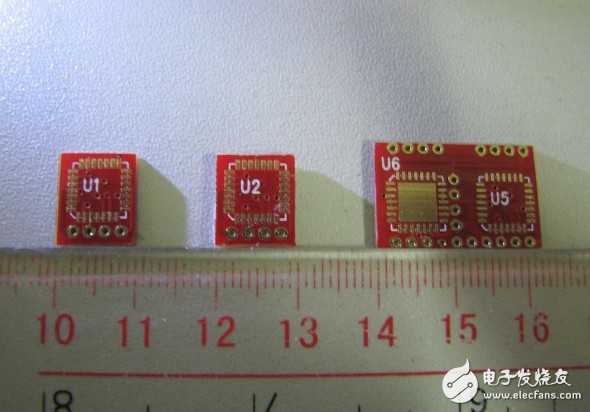 8.IMU模块组装好的样子
8.IMU模块组装好的样子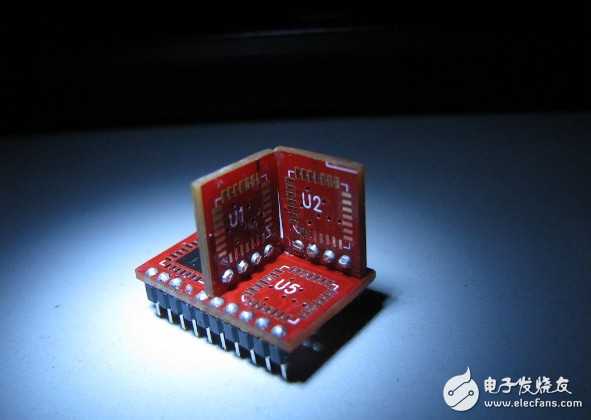 9.这边是加速计
9.这边是加速计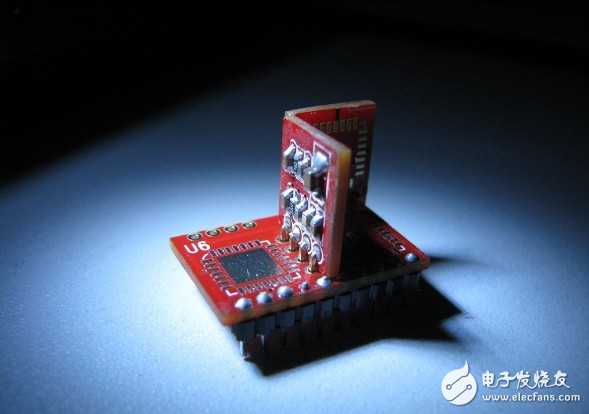 因选型的ST陀螺仪当时市场上没现货,找到一家代货公司直接从ST原厂买进,价格很贵。在抱着无限耐心中等待了漫长的两个星期后,总算是拿到了。10.ST陀螺仪芯片
因选型的ST陀螺仪当时市场上没现货,找到一家代货公司直接从ST原厂买进,价格很贵。在抱着无限耐心中等待了漫长的两个星期后,总算是拿到了。10.ST陀螺仪芯片 11.LISY300AL
11.LISY300AL 12.MEMS单轴陀螺仪
12.MEMS单轴陀螺仪 13.LGA28封装
13.LGA28封装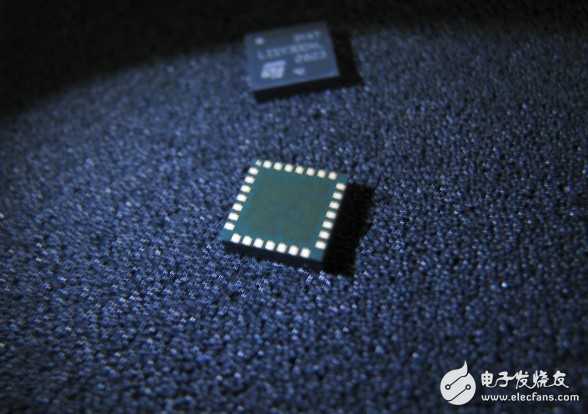 14.3轴陀螺仪,模拟轴出
14.3轴陀螺仪,模拟轴出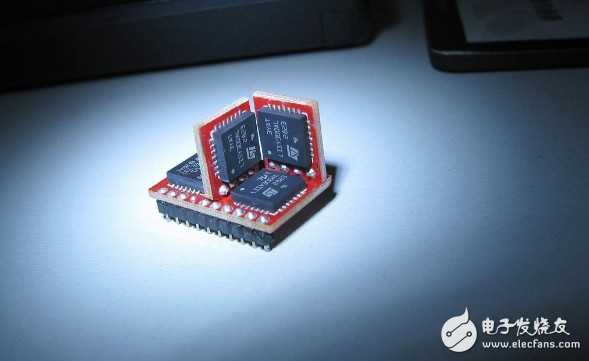 15.3轴加速计,使用IIC接口
15.3轴加速计,使用IIC接口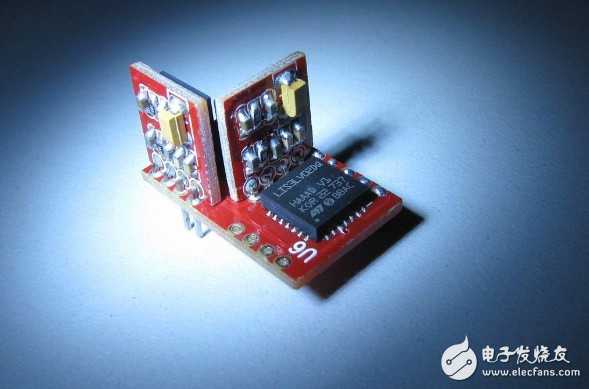 全部完工的飞控板。 板上接口共计有4路电调、1路PPM输入、2路UART通信串口,可接数传电台、GPS。另有一路可控的11V输出,用来接高亮LED发光条做夜航灯用。 蜂鸣器做操作必要的提示音用,电池低电时可通过发音提醒操作者需要着陆更换电池了。16. 飞控板完成效果图
全部完工的飞控板。 板上接口共计有4路电调、1路PPM输入、2路UART通信串口,可接数传电台、GPS。另有一路可控的11V输出,用来接高亮LED发光条做夜航灯用。 蜂鸣器做操作必要的提示音用,电池低电时可通过发音提醒操作者需要着陆更换电池了。16. 飞控板完成效果图

17. 飞控板背面。4路电调通信接口,2路UART,1路PWM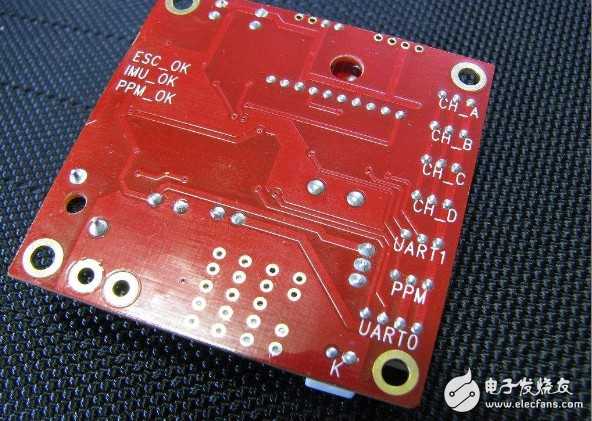
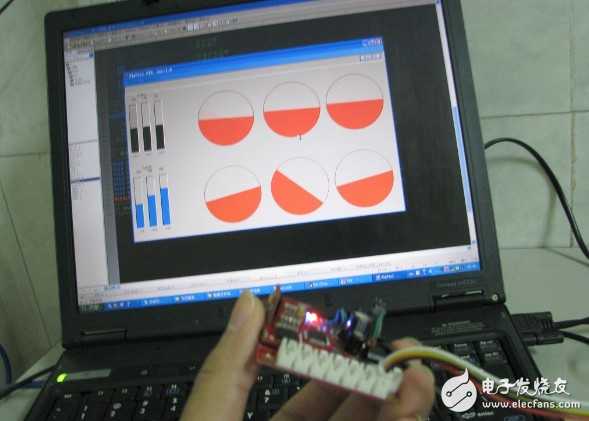
找朋友帮忙做的上位机,调试姿态使用。
18. 3轴陀螺+3轴加速计上位机

19. 飞控使用串口和上位机通信

20. 陀螺、加速计姿态
到此做四轴飞行器的必备之硬件条件、工具等前期工作已全部准备完毕。剩下的就是飞控软件的编写调试了,这注定是个痛苦+辛苦+漫长+繁琐+N次不规则循环的过程,希望千万别是死循环。当然,更期待的是成功一瞬间那种无可名状的激动心情。为了成功,加油了!也请各位在座的坛友,多多支持!多多鼓励!好让我感受到,偶不素一个人在战斗。
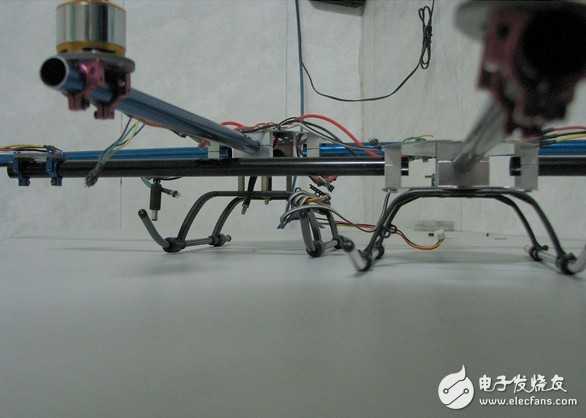
前不久对机架和电调的位置进行了调整,把4个电调全放进了硬盘中心架的夹层里去了。以前放在外面是怕调试中万一烧了MOS管,方便更换的。试验了几个月,MOS管安然无恙。放入中心架里会美观很多。 4个电机的线全部从尾管中穿过
 电池挂在中心架下面,用弹力带和魔术贴固定
电池挂在中心架下面,用弹力带和魔术贴固定 另加了四个弹性脚架,防止过分摔机
另加了四个弹性脚架,防止过分摔机 传个图上来吧,很多人搞不明白四轴飞行器如何能旋转飞行。要注意的是,4个桨分两组,一组正桨,一组反桨,两组桨出现转速差,那么动平衡就没了,飞行器对外呈现整体旋转力,根据正、反桨的转速不同,实现左旋右旋。
传个图上来吧,很多人搞不明白四轴飞行器如何能旋转飞行。要注意的是,4个桨分两组,一组正桨,一组反桨,两组桨出现转速差,那么动平衡就没了,飞行器对外呈现整体旋转力,根据正、反桨的转速不同,实现左旋右旋。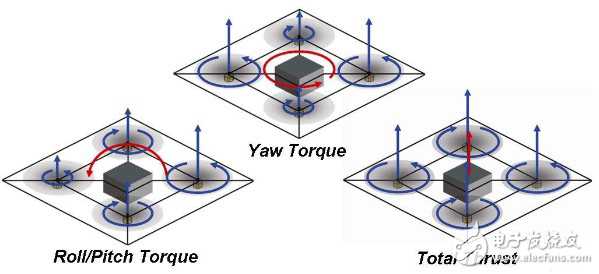 前几天傍晚在小区篮球场飞四轴,当时有2级左右的风,在飞第二块电池时没控制好高度,在做了个连续旋转平飞的动作后,四轴被风吹得飘远了,眼看着要撞上楼房了,一时情急乱了手脚,没控制好。四轴撞上房子后从4层楼的高度直接掉下来,摔到了水泥地面上,机架摔损严重。所幸的是飞控板、电调、电机、电池都没受伤。这两天又重新制作了一款更轻的机架,模仿MK的结构。感觉这样简单的才实用,用电直配件做出的机架,看着漂亮,但造价太贵了。摔坏的机架,过两天再看下能否修复。 02.碳纤四轴飞行器
前几天傍晚在小区篮球场飞四轴,当时有2级左右的风,在飞第二块电池时没控制好高度,在做了个连续旋转平飞的动作后,四轴被风吹得飘远了,眼看着要撞上楼房了,一时情急乱了手脚,没控制好。四轴撞上房子后从4层楼的高度直接掉下来,摔到了水泥地面上,机架摔损严重。所幸的是飞控板、电调、电机、电池都没受伤。这两天又重新制作了一款更轻的机架,模仿MK的结构。感觉这样简单的才实用,用电直配件做出的机架,看着漂亮,但造价太贵了。摔坏的机架,过两天再看下能否修复。 02.碳纤四轴飞行器 03.别看错了,是两个
03.别看错了,是两个 04.中心架用尼龙螺丝固定
04.中心架用尼龙螺丝固定 05.换个角度
05.换个角度 06.这里要装电池,螺丝反过来装
06.这里要装电池,螺丝反过来装 07.机架的净重
07.机架的净重 08.两个一起的重量
08.两个一起的重量 09.新买的XXD2212电机
09.新买的XXD2212电机 10.装上电机后的重量
10.装上电机后的重量 11.新焊的电调板
11.新焊的电调板 12.新焊的电调板
12.新焊的电调板 13.装上电调和飞控板
13.装上电调和飞控板 14.飞控板
14.飞控板 15.装完了,上电看看效果
15.装完了,上电看看效果 16.来个近距离的
16.来个近距离的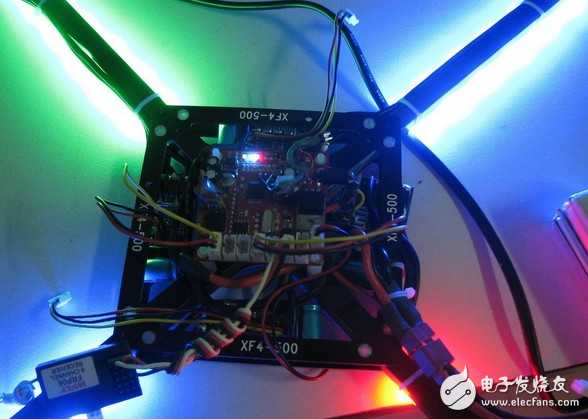 新机架电路部分彻底完工了,剩下脚架暂时没想到好方法,没有做上去。今晚在室内试飞,看看新机架有无稳定性问题。首飞2分钟后,降落重新标定陀螺仪中立点,再次飞行中,一时大意撞上了凳子,小炸一下,洗衣粉袋子惨遭破皮。 后在室外进行了Z轴连续旋转平飞测试,效果比之前有大幅进步,摇杆操控手感灵敏,四轴反应动作麻利,抗风能力也有明显提高。悬停表现还不太满意,遥控无操作情况下最长能保持5、6秒不漂移,得继续努力。由于相机SD卡坏掉,无法拍下飞行过程。 本人的操作水平略有提高在室内测试偏航感度效果很满意,房间太小,连续快速水平旋转的动作没做测试。新代码里加入了上电无遥控信号告警、飞行中遥控信号丢失时告警、飞机回到水平姿态执行自动降落动作,这个功能需要在室外测试。测试拍的视频用软件编辑后转RM,出来的图象惨不忍睹,试了N种方法和格式,在网上下了好几款视频后期编辑软件,要么不好用,要么转出来的图象一塌糊涂。一直拖到今天,才算弄得象点样子。把我的全金属机架又装起来了,单向碳纤容易裂,编织的太贵,并且没有方形的,还是铝管来得实在!
新机架电路部分彻底完工了,剩下脚架暂时没想到好方法,没有做上去。今晚在室内试飞,看看新机架有无稳定性问题。首飞2分钟后,降落重新标定陀螺仪中立点,再次飞行中,一时大意撞上了凳子,小炸一下,洗衣粉袋子惨遭破皮。 后在室外进行了Z轴连续旋转平飞测试,效果比之前有大幅进步,摇杆操控手感灵敏,四轴反应动作麻利,抗风能力也有明显提高。悬停表现还不太满意,遥控无操作情况下最长能保持5、6秒不漂移,得继续努力。由于相机SD卡坏掉,无法拍下飞行过程。 本人的操作水平略有提高在室内测试偏航感度效果很满意,房间太小,连续快速水平旋转的动作没做测试。新代码里加入了上电无遥控信号告警、飞行中遥控信号丢失时告警、飞机回到水平姿态执行自动降落动作,这个功能需要在室外测试。测试拍的视频用软件编辑后转RM,出来的图象惨不忍睹,试了N种方法和格式,在网上下了好几款视频后期编辑软件,要么不好用,要么转出来的图象一塌糊涂。一直拖到今天,才算弄得象点样子。把我的全金属机架又装起来了,单向碳纤容易裂,编织的太贵,并且没有方形的,还是铝管来得实在! 有刷电机版四旋翼飞行器,用商品飞行器改装实现,飞行稳定,手可以轻松脱控。泡沫的东东,玩起来很有安全感 ,况且还有桨保护圈。有刷电机+减速组,效率相当不错,一块满电的 3S 1500mA 电池可以持续飞行18分钟。放个有刷的出来给大家换换感觉。 改装完成的有刷电机版四旋翼飞行器
有刷电机版四旋翼飞行器,用商品飞行器改装实现,飞行稳定,手可以轻松脱控。泡沫的东东,玩起来很有安全感 ,况且还有桨保护圈。有刷电机+减速组,效率相当不错,一块满电的 3S 1500mA 电池可以持续飞行18分钟。放个有刷的出来给大家换换感觉。 改装完成的有刷电机版四旋翼飞行器 看侧面
看侧面 有刷电机和减速组
有刷电机和减速组 到室外试飞
到室外试飞
厉害,渣渣无限敬仰
厉害期待更新
期待更新~~!
实在很期待啊 很棒啊
谢谢小编分享了
土豪就是不一样啊,什么都可以自己搞了。牛!
反正我是高不来啊!
期待土豪继续更新
土豪就是土豪,光是材料都不知花多少钱了~
感觉很厉害的样子,围观!
厉害 值得学习
装备真的不错 厉害
不错,值得学习!
默默的飘过!