STM32F407 模块整合
时间:10-02
整理:3721RD
点击:
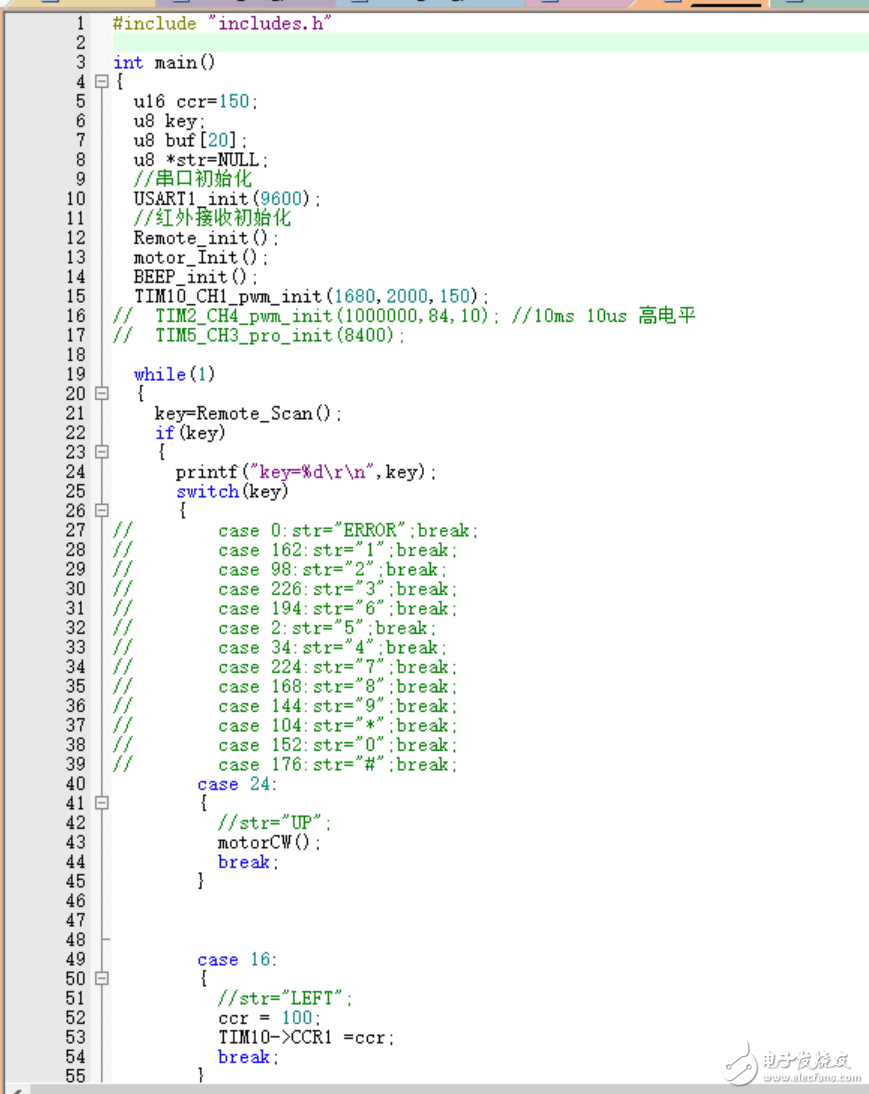
F407 红外遥控控制 舵机和步进电机。
红外输入捕获管脚为PA8
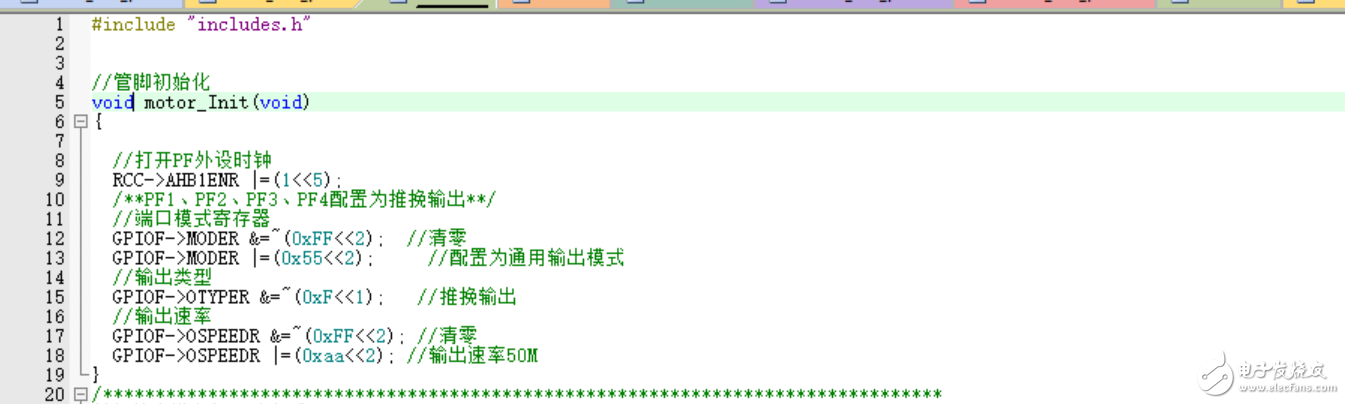
步进电机控制管脚位PF1 PF2 PF3 PF4
控制舵机的PWM波输出管脚位PF6。
问题:
为什么在红外遥控控制时,舵机和步进电机单独使用均能实现。
在使用舵机后,步进电机也能正常运作,但在步进电机使用后,舵机会出错,不受控制或是完全不起作用,但通过测试,红外遥控的功能仍然正常。
附上控制函数
红外输入捕获管脚为PA8
步进电机控制管脚位PF1 PF2 PF3 PF4
控制舵机的PWM波输出管脚位PF6。
问题:
为什么在红外遥控控制时,舵机和步进电机单独使用均能实现。
在使用舵机后,步进电机也能正常运作,但在步进电机使用后,舵机会出错,不受控制或是完全不起作用,但通过测试,红外遥控的功能仍然正常。
附上控制函数

也不是,只要配置和操作时不互相影响,这个是没有关系的。
这里有个STM32免费样品申请的链接,需要填个问卷。希望可以帮到你
https://www.sojump.hk/jq/15943942.aspx
程序不全,无法做出准确判断。推测可能是步进电机操作时影响到了舵机控制口的状态,看你步进电机和舵机用的都是PF口,不处理好的话很容易互相影响的。当然只是推测,你可以仔细检查一下程序看看。
虽然都用了PF口,但都用的PF口不同的GPIO口..应该不会造成什么影响吧。
操作不当时可能会误操作整个PF口,所以让你在仔细检查下程序,是不是有这样的问题,当然我只是推测。
这些是这几个模块的管脚初始化函数,我感觉应该没有干扰吧。还是PF时钟线的问题呢?
步进电机
舵机

红外

GPIOF的MODER寄存器两个配置是不是冲突了?我没细看,你自己确认下
没有冲突.
那暂时就不清楚了。
谢谢您。那一般像这样整合,都会使用不同的GPIO口是么
没有找到哪里有影响的位置..就很尴尬