控制采样电机
气体采样采用主动抽取气体的方式保证充足而平稳的气流,所以我们采用气泵抽取气体来完成。
1、设计概述
客户对这部分要求能够设定电机的速度,但并不需要动态调节。对电机的控制有很多方式,我们采用比较简单的方式。我们采用定时器产生PWM舶来实现这一控制过程。
2、硬件连接
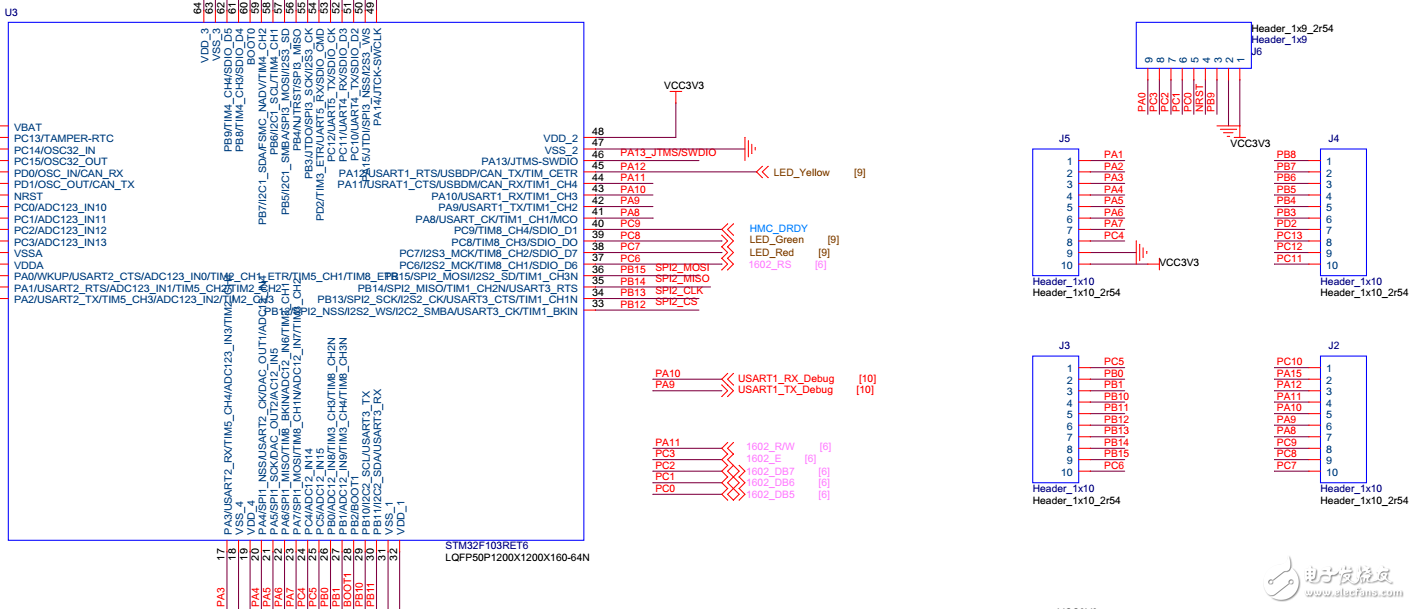
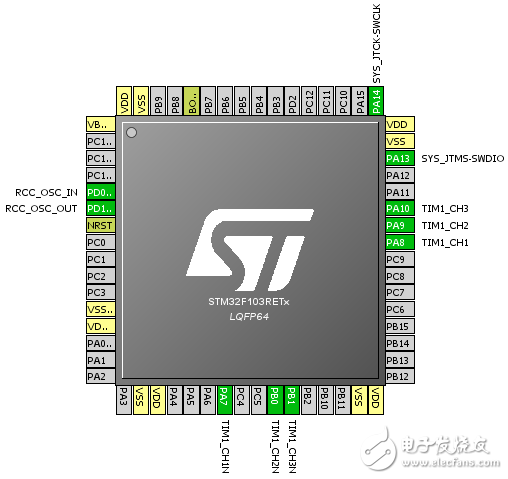
对电机的控制我们使用高级定时器TIM1产生PWM波来控制,对于OneNET麒麟座中TIM1的通道1、2、3以及他们的互补输出均已经引到了端子排J2-5(PA10)、2-6(PA9)、J2-7(PA8)、J5-7(PA7)、J3-2(PB0)、J3-3(PB1),如下图所示:
所采用的空气泵是一种比较小型的设备,需要12V-24V电源,具体如下:

由于电机是12V-24V的所以我们还需要必要的电路来完成这一功能,控制板如下图所示:

这种控制板的原理图如下所示,在后续的设计中我们将设计为一体:

接下来我们在STM32CubeMX中作相应的配置,配置如下:
3、软件设计
完成硬件的配置和连接后,我们开始编写软件,首先,我们实现必要的初始化,使得PWM波形能够产生。
/* 对TIM1进行初始化配置*/
static void TIM1_PWM_Initialization(void)
{
TIM_MasterConfigTypeDef sMasterConfig;
TIM_OC_InitTypeDef sConfigOC;
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig;
htim1.Instance = TIM1;
htim1.Init.Prescaler = 0;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 0;
htim1.Init.ClockDivision = TIM_CLOCKdivISION_div1;
htim1.Init.RepetitionCounter = 0;
if(HAL_TIM_OC_Init(&htim1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sMasterConfig.MasterOutputTrigger= TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if(HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) !=HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sConfigOC.OCMode = TIM_OCMODE_TIMING;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if(HAL_TIM_OC_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
if(HAL_TIM_OC_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
if(HAL_TIM_OC_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if(HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) !=HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
HAL_TIM_MspPostInit(&htim1);
}
完成配置后,我们接下来编写一个控制程序,用以调节占空比。具体的实现代码如下:
//配置TIM1为PWM输出
void PWM_Configuration(void)
{
//计算初始化的频率和占空比
TimerPeriod = PWMTimePeriod;//计算用于设置ARR寄存器的值使产生信号的频率为17.57 Khz
PWM1Pulse= (uint16_t) (((uint32_t) 5 * (TimerPeriod - 1)) / 10);//计算CCR1寄存器的值在通道1和1N产生50%占空比,用于TIM1
PWM2Pulse= (uint16_t) (((uint32_t) 5 * (TimerPeriod - 1)) / 10);//计算CCR1寄存器的值在通道1和1N产生50%占空比,用于TIM8
PWM_InitProcess(TIM1,TimerPeriod,PWM1Pulse);
}
配置完成编译后,基本能都达到效果,在随后的设计中我们将进一步改进。
干货 顶贴