如何在STM32中实现模糊自整定PID算法?
大家有没有做过相关的研究呢?
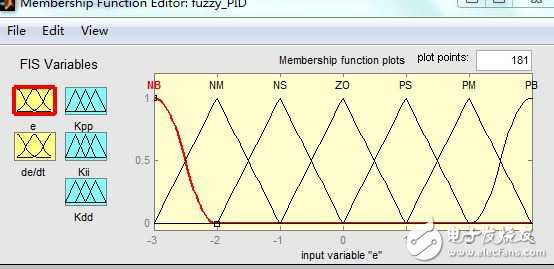
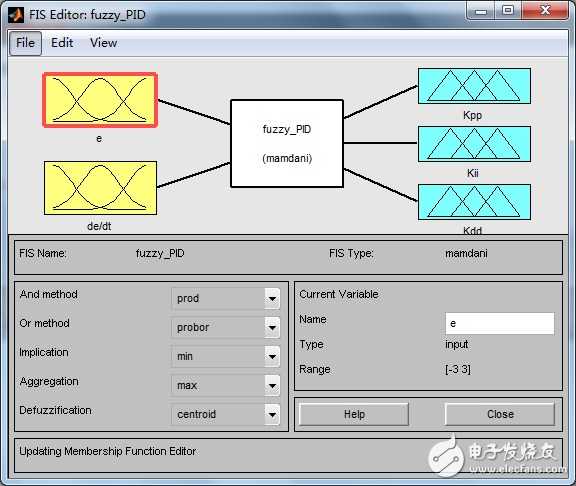
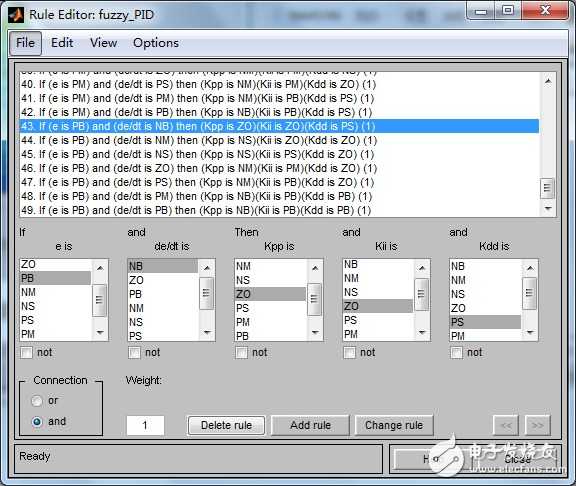
下面是MATLAB做的fuzzy参数
沙发自己的先有坛友一起做的吗?
实际模糊控制的算法计算过程是离线完成的,你只要在matlab里面生成模糊控制表,在单片机中只要查表操作就可以完成模糊PID控制了。
有些问题没有解决,想要问一下前辈:
查表的问题,比如我E 是 NB ; EC是 NB ,查表得到Kp是PB ,这个PB接着是不是进行解模糊(这里用重心法)呢? 另一方面,我查表后输出的语言变量既然都是可以通过解模糊把实际值算出来(比如刚刚的Kp得到PB,PB用重心法算到一个值0.2),那么我 KP KI KD 三张表里面的 语言变量 NB NM NS ZO PS PM PB 都可以用一个值来代替了,在单片机就是建个二维数组。可以这么想吗?
推荐一本书:
本书以基于模型的设计为主线,讲述了M代码和Embedded MATLAB代码的快速编写与调试、浮点Simulink/Stateflow模型的建立、调试与验证以及用户驱动模块的创建;详细介绍了基于模型设计的全过程,主要包括:需求的验证与跟踪、模型的系统测试与设计验证、浮点到定点模型的转换、模型嵌入式C代码的自动生成以及软件/处理器/硬件在环测试。整个过程满足DO~178B航空电子规范,可显著提高工作效率、降低开发成本,并且增加了代码的安全性与鲁棒性,避免了产品开发的潜在市场风险。
里面的用matlab建模之后,可以自动生成C代码部分可以参考一下。
请问是什么书呢
应该是这本《基于模型的设计及其嵌入式实现 》
谢谢分享谢谢分享谢谢分享
谢谢分享谢谢分享 谢谢分享
谢谢分享谢谢分享 谢谢分享
谢谢分享 谢谢分享谢谢分享谢谢分享
谢谢分享 谢谢分享 谢 谢
谢谢分享 谢谢分享 谢 谢
谢谢分享 谢谢分享 分 分
谢谢分享 谢谢分享 享 享
谢谢分享 谢谢分享 谢 谢
谢谢分享 谢谢分享 谢 谢
谢 谢谢分享 谢谢分享 分 分
谢谢 谢谢分享 谢谢分享 享 享
谢谢分 谢谢分享 谢谢分享 谢 谢
谢谢分 谢谢分享 谢 谢
谢谢分谢谢分享 谢 谢
谢谢谢谢 分 分
谢谢 享 享
大神解决了吗
大神解决了没有
大神解决了没有?
小编模糊PID仿真做的挺好的,值得借鉴