一块PCB板子的诞生
PCB成型製程在電子構裝中所扮演的角色
[size=12.8000001907349px]
下圖是電腦主機的內部組成
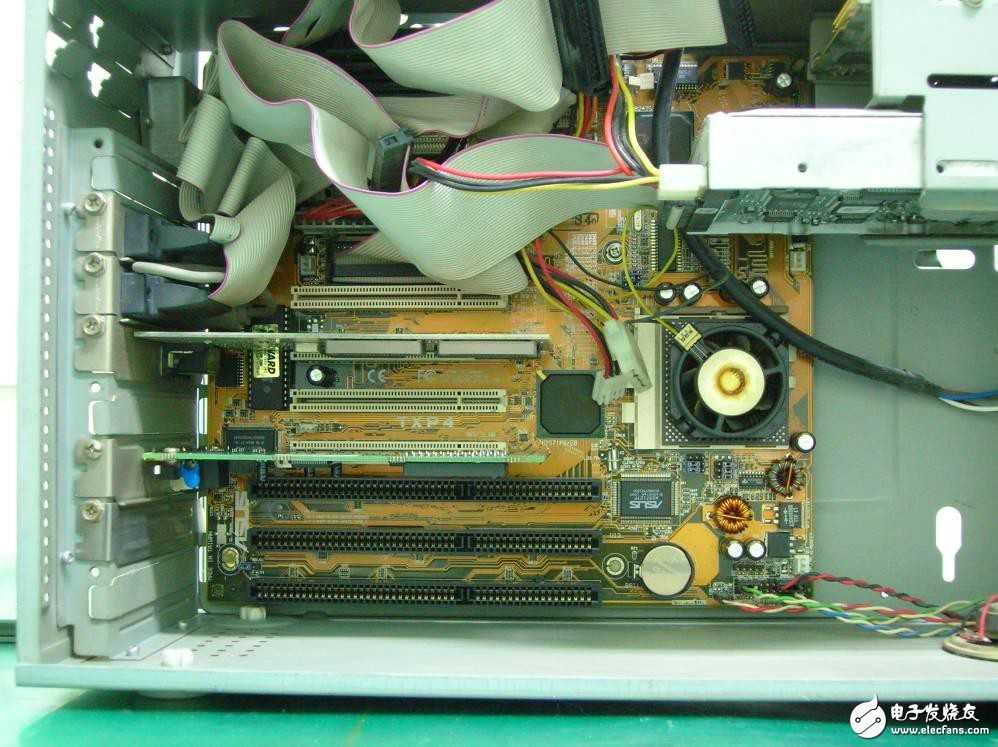
我們將以插在主機板上的一片 USB擴充卡來說明PCB成型製 程在電子構裝中所扮演的角色
[size=12.8000001907349px]PCB成型製程的子製程

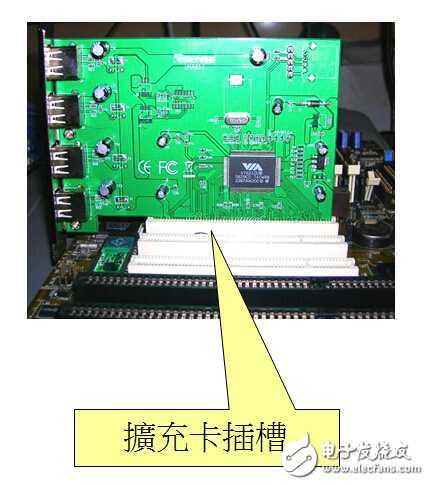
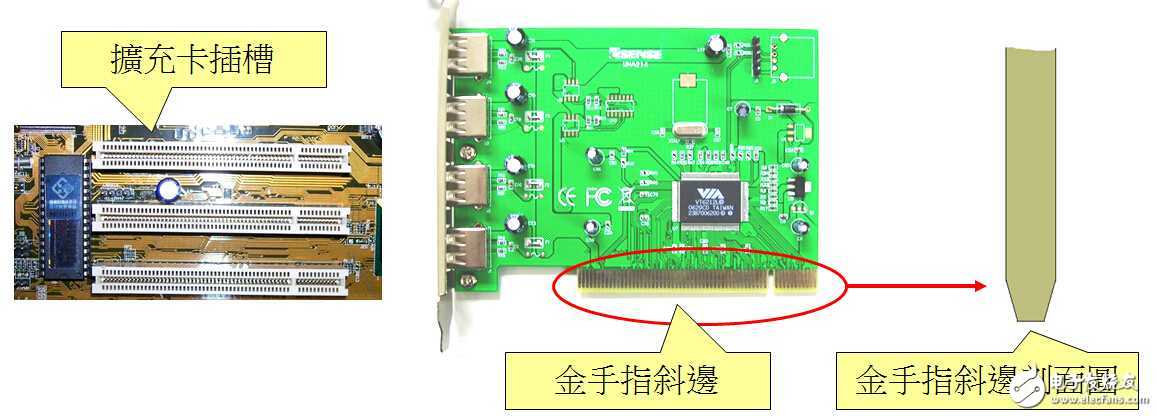
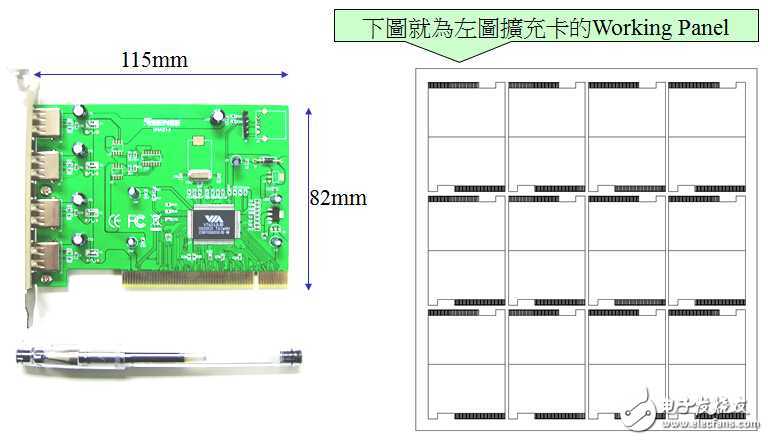
USB擴充卡要插入主機板上的插槽進行電子訊號的聯結。為了降低板子 插入時的阻力,會在板子的邊緣做出一斜面(如圖所示),要做出這個斜邊, 就要靠斜邊製程。
斜邊製程
[size=12.8000001907349px]
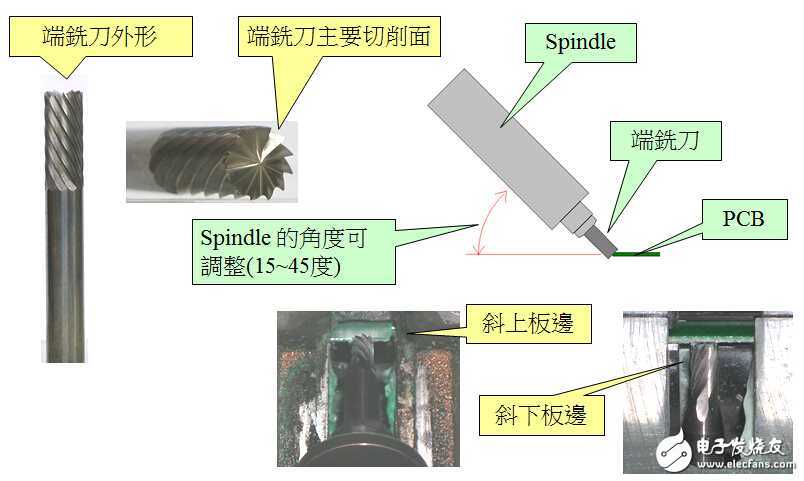
要在板邊做出斜邊,主要是以端銑刀對板子邊緣進行旋轉切削。
[size=12.8000001907349px]斜邊製程品質異常範例
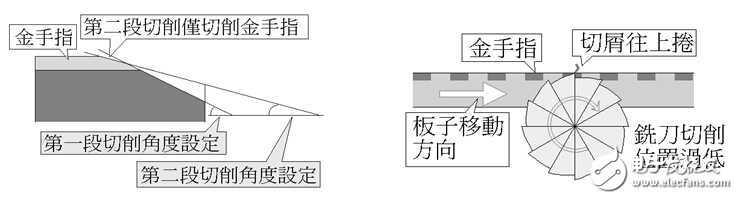
斜邊深度大時,會使用二支Spindle作兩段式作業,但二支Spindle的角度如 果有差異,及第一段切削過深,使得第二段僅能切削金手指部分,加上銑 刀位置設定過低,及銅的延展性,讓第二段切削無法有效切斷切屑,而形 成銅Burr(見下圖),金手指銅Burr在斜邊製程是一個重大異常,因會造成短 路。
[size=12.8000001907349px]斜邊製程品質異常範例(續)
防止措施:
一、兩段式作業時,第一段切削的深度設定值僅可為規格值的1/2~3/5。
二、銑刀切削位置的設定為銑刀中心需在板子上的斜邊區域的中心, 見下圖所示。
[size=12.8000001907349px]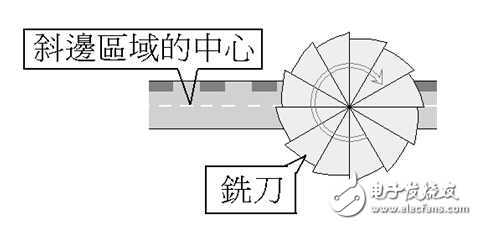
下圖為USB擴充卡的尺寸。在PCB製程,因生產效率及成本的考量, 不可能全製程都以115mm X 82mm的尺寸來生產,一定會將其複製組 合成大尺寸板子,再行生產,此大尺寸板子就是我們所謂的Working Panel
[size=12.8000001907349px]PCB全製程簡介(單或雙面板)

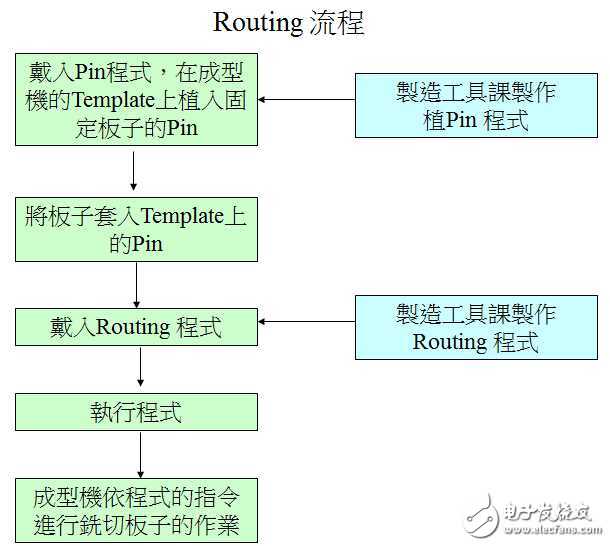
[size=12.8000001907349px]Routing 製程
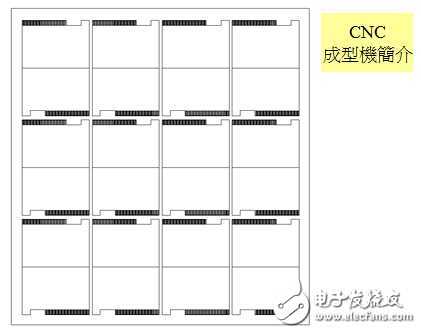
使用銑刀以旋轉切削的方式,將Working Panel 中不需要的板材削除,並做 出客戶所需的外型(Shipping Panel)。

銑刀要精準的延著SPNL的外型移動並銑 切,就必須使用電腦數值控制(CNC)的 工具機,就是我們所謂的CNC成型機。
[size=12.8000001907349px]
[size=12.8000001907349px]
[size=12.8000001907349px]Routing 程式的製作基本概念 何謂程式製作:
CNC Rout的加工是利用程式來控制刀具的切削位移,因此使用CNC工具 機來加工時,首先須把刀具的移動路徑和其他加工條件轉換為程式,所製作的程式即為加工程式。
程式的設計方法:可分為 1、手工程式設計(manual programming) 2、自動程式設計(automatical programming)
程式設計流程如下: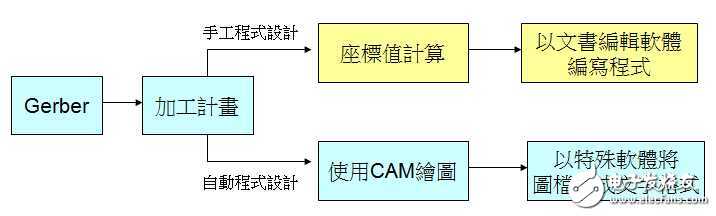
[size=12.8000001907349px]Rout 指令的基本概念
Routing 指令的基本概念為:指定一個起始點座標及終點座標,並決定在起 始點與終點間,要走直線或圓弧。走圓弧時,還要再指定此弧的有效的半徑 值。
PCB的外型從簡單的矩形到奇形怪狀,其輪廓都是由兩種元素所組成。
此兩種元素就是: 線段及圓弧

[size=12.8000001907349px]本廠製造工具課Routing程式的設計方法
[size=12.8000001907349px]
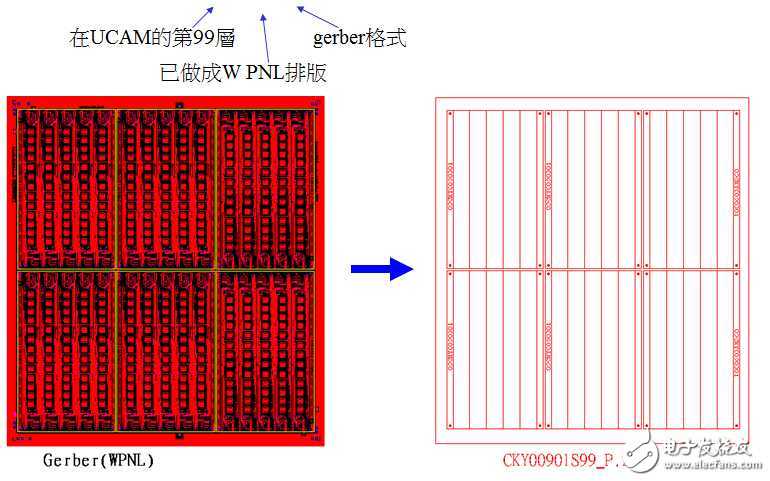
CNC Rout 程式的產生—(Gerber轉檔)
製造工具課CAM做料號人員將客戶的Gerber,分離出成型框及選定的Pin孔後,另存為 CKY00901S99_P.274(DXF格式)
[size=12.8000001907349px]
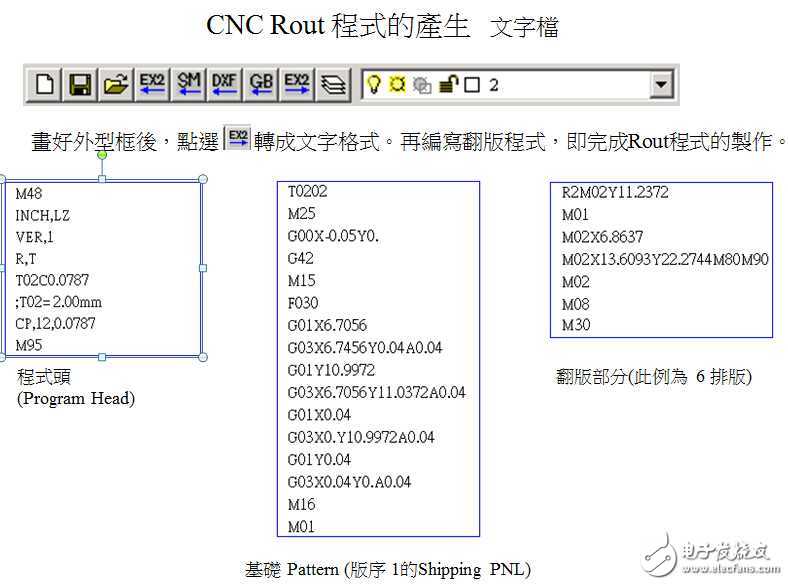
CNC Rout 程式的產生—(程式製作)
1、CAM Rout程式製作人員將,CKY00901S99_P.274 讀進 AutoCAD軟體, 並轉成CKY00901.dwg 格式,存在第0層(Layer 0)。
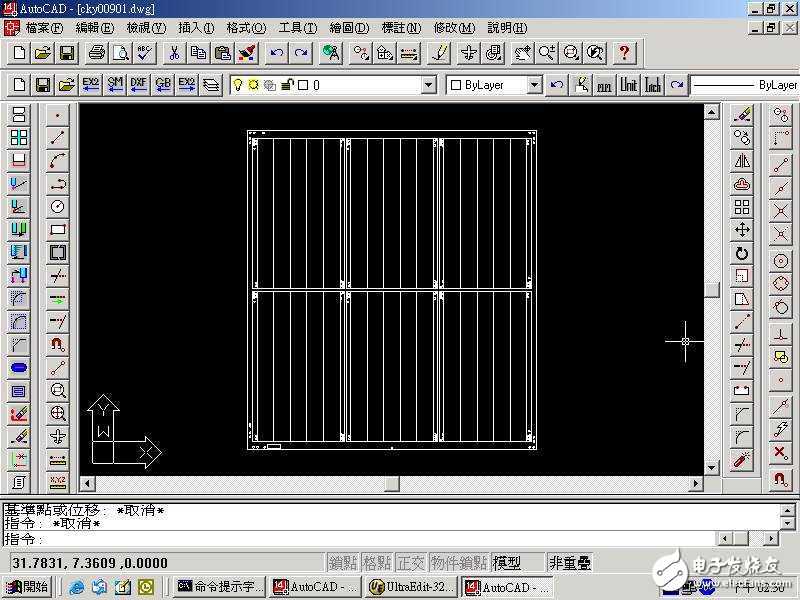
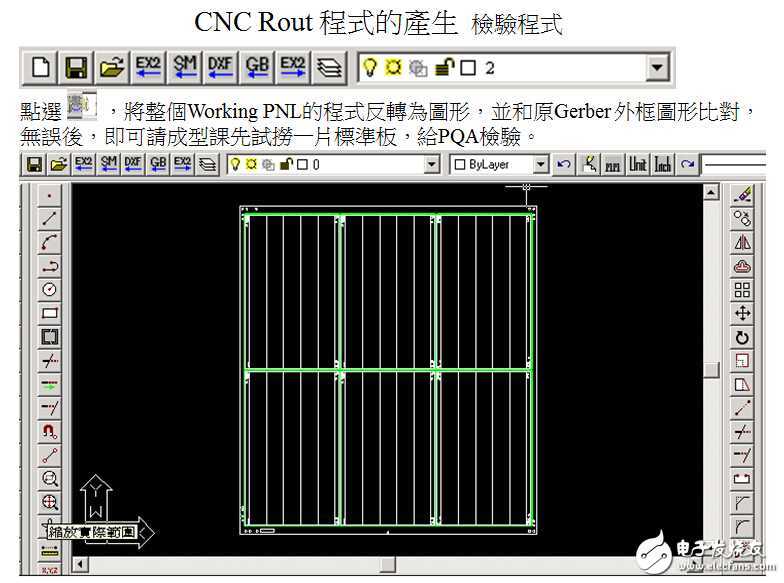
CNC Rout 程式的產生—(AutoCAD繪圖)
[size=12.8000001907349px]
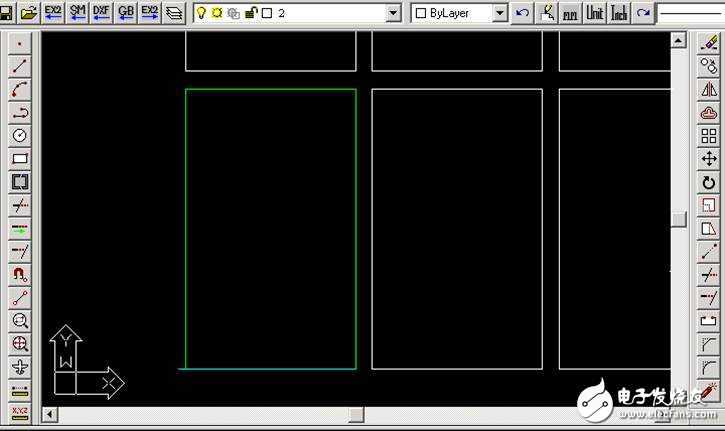
2、以不同的圖層定義不同刀徑的銑刀,選擇合適的刀徑,另開圖層(例Layer 2) 套 在 Layer 0上,針對第一個排版的外型框,以AutoCAD的繪圖指令,畫出成型框。
[size=12.8000001907349px]
[size=12.8000001907349px]
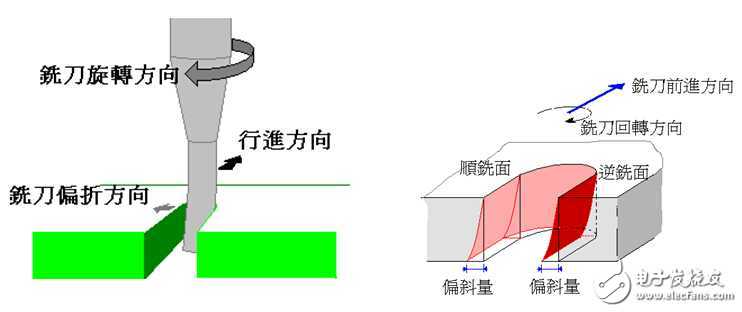
[size=12.8000001907349px]銑刀切削板材時的特性
銑刀在切削板材時的最大特性就是會偏折,在多疊片加工時,每一片板子 的尺寸都會有差異。所以要給銑刀在進行切削時一個適當的補償值,好讓 板子的尺寸皆能在規格內。
[size=12.8000001907349px]銑刀切削板材時基本注意事項
[size=12.8000001907349px]V-Cut製程
前面提到,客戶為了上零件的效率,會以多連片的方式進行零件的組裝, 但當完成零件的組裝後,要如何將多連片的板子分開成最後的成品板呢? 那就是在要分開的位置做兩面各做一道V槽(見下圖所示)
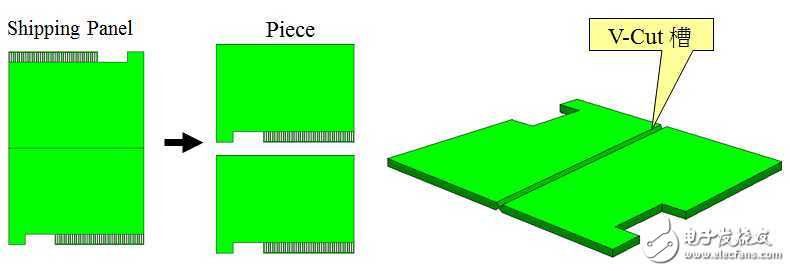
V-Cut製程介紹
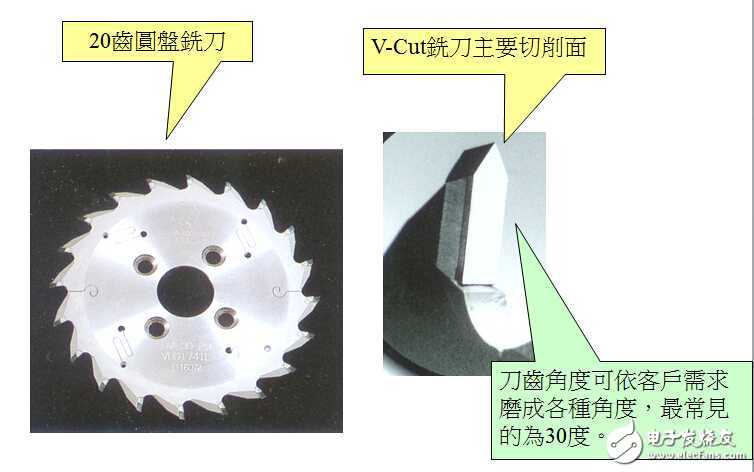
要在板面做出V槽,主要是以20齒圓盤銑刀對板子表面進行旋轉切削。
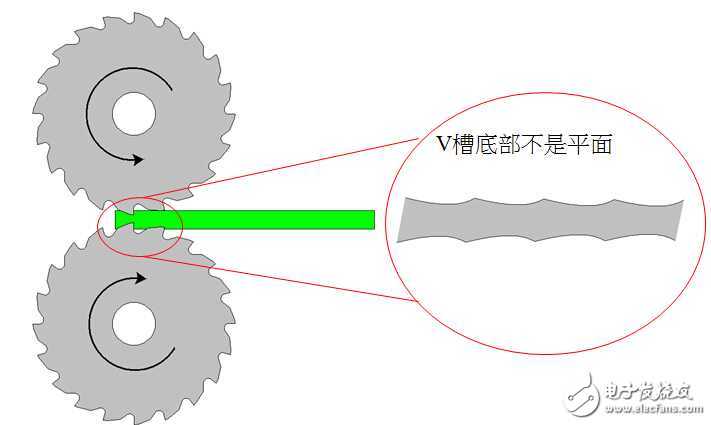
上下刀同時對板子進行V-Cut作業
[size=12.8000001907349px]模沖製程
將Working Panel 變成Shipping Panel,除了Routing方式外,還有以模 具,利用沖剪原理,直接將板子沖剪成客戶要的外型。
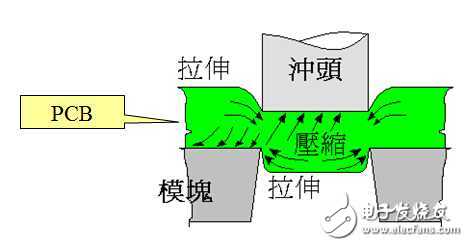
沖剪製程的基本原理
1、材料置於沖頭與模塊之間(見下圖),由沖頭的壓力迫使材料壓入模孔
內,材料受到壓縮與拉伸作用,而產生壓縮與拉伸應力,如下圖。
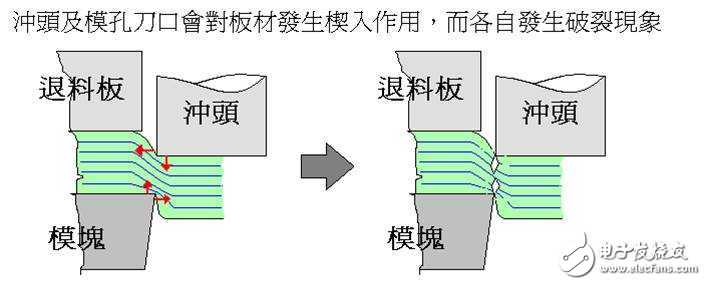
2、沖頭繼續下降,沖頭及模孔刀口部附近之材料表面應力已經超過破 壞強度以上,材料表面之纖維開始被剪斷,見下圖
[size=12.8000001907349px]
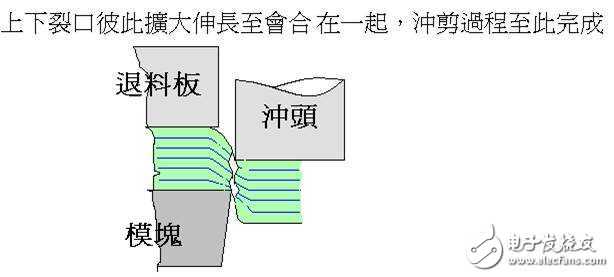
3、雖然說沖剪完成,如果沖頭不繼續 下降,材料仍然會卡在一起,所以實 際上沖頭還要繼續下降,才能順利、 有效率地將材料完全離。
[size=12.8000001907349px]
模具圖示
[size=12.8000001907349px]
在PCB成型製程中,除了模沖製程外,其他的製程可說是切削刀具學 的應用,切削刀具最重要的控制因素即為切削速度及進刀。
切削速度為刀具的圓周速度;而進刀是刀具每分鐘所前進的距離。
刀具的圓周速度及進刀,如不適當時,將會導致刀具的急速磨耗及不 良的切削品質,因此,給予刀具最佳的圓周速度及進刀,是工程師的 主要研究課題。
[size=12.8000001907349px]何謂CNC? CNC為Computer Numerical Control 的縮寫。數值控制(NC)的定義 :
數值控制(Numerical Control,簡稱NC),凡是利用字母(letter)、數字 (Number)及符號(Symbol)等數值資料(Numerical data),編寫成一連串 的加工指令,來控制機器之運轉與加工,這種有別於傳統完全用手 工操作的控制方式稱為數值控制(簡稱數控),理所當然,這一連 串的加工指令就可稱為加工程式或數控程(NC Program)。
電腦數值控制(CNC)就是將NC的各種機能用一微處理機來控制。
[size=12.8000001907349px]
CNC成型機的構成
[size=12.8000001907349px]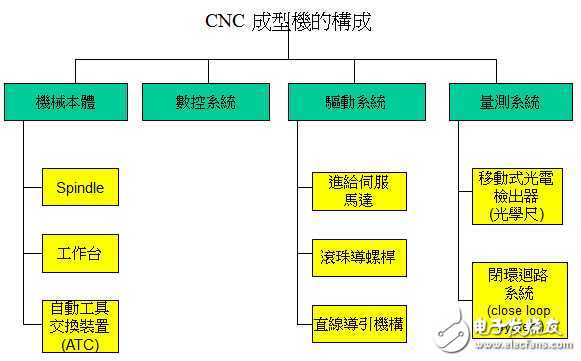
[size=12.8000001907349px]CNC 成型機的驅動系統
驅動系統即進給機構,它包含進給伺服馬達,滾珠螺桿、直線導引機構等三大部份
本圖所示的為Y軸方向的驅動系統
[size=12.8000001907349px]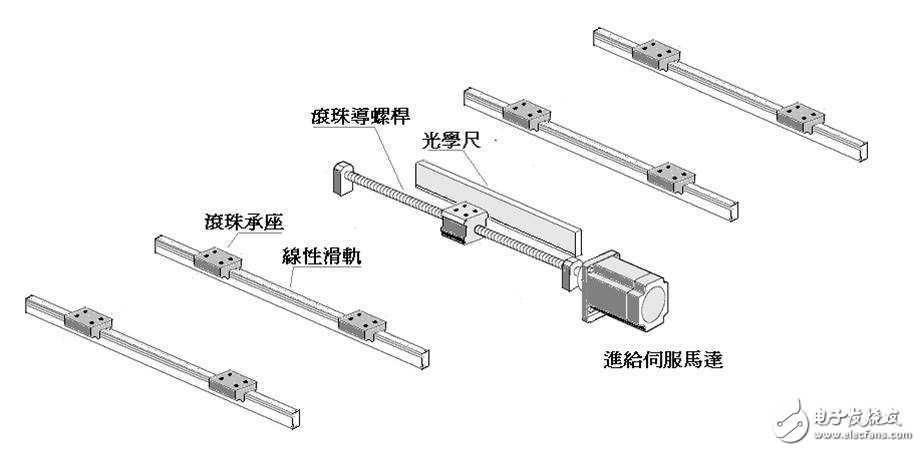
1.進給伺服馬達
數值控制用的進給伺服馬達,異於一般的馬達,它具有獨特的轉矩與優異的加減 速特性,以便於控制工作台的各種定位及切削運動。
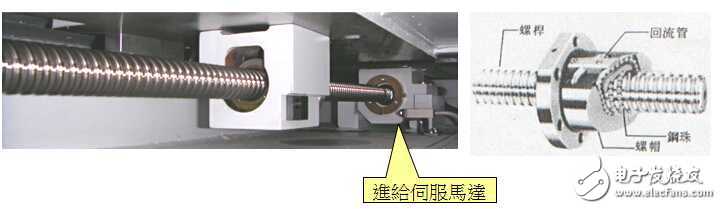
2、 滾珠導螺桿
切削中心機工作台的定位,是利用滾珠導螺桿(ball screw)將進給伺服馬達的旋轉運
動轉換成直線運動。
3、直線導引機構
[size=12.8000001907349px]
採用滾柱或滾珠的直線運動(linear motion)承座,由於運動方式由滑動改變成滾 動,因此大幅降低了摩擦係數。

CNC 成型機的量測系統(1)
[size=12.8000001907349px]
CNC成型機位移精度的達成,除藉助於精確的進給伺服馬達與零間隙的滾 珠導螺桿外,有賴於位置檢出器的使用,本機是採用移動式光電檢出器。
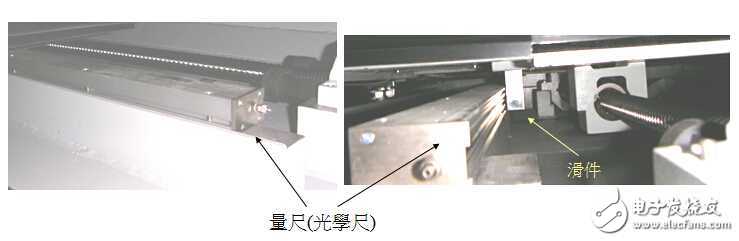
1、移動式光電檢出器
信號的產生是在長方形的玻璃板上,利用光干涉原理,產生暗明變化而輸出 不同的波形,以完成位置檢測。
移動式光電檢出器由滑件與量尺構成,一方安裝於固定部,一方安裝於移動 部,因此不管螺距發生誤差或有間隙發生,均能精確的檢測出位移量。
[size=12.8000001907349px]
光學尺原理
精密線性量測元件,光學尺內部有一長條型之玻璃,玻璃上蝕刻微細等間距之光 柵。 在光學尺上方有一讀取頭,內部隱藏有光學發送穿透光柵與接收之元件。 經由移動讀取頭位置,其光學元件就不斷產生對應之弦波, 弦波經電路比較分 割後,可以得到對稱之方波輸出。 光學尺一般會有三組輸出分別為A相、B相與 C相。
AB兩相物理位置為相差半個間隔之光柵組,故其訊號輸出為相差 90度之相位角。 此兩相訊號經電子電路(輸入至控制卡以交割模式接收)做四倍分割後,可以得到 光學尺之最高精度,一般可以準確到 1μ ( 10 的負6次方米)以下之精度。 至於 C相,或稱為Z相,係為標記點。 一個光學尺可有 1至多個不等間距之標記點, 做為歸零之原點使用。 若為頭尾兩個標記點,亦可兼作為極限之保護點。
[size=12.8000001907349px]CNC 成型機的量測系統(2)
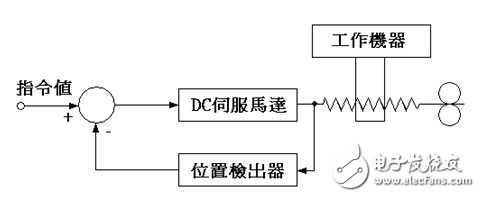
2、位置檢出器與迴路系統的關係 是採用閉環迴路系統(Close loop system)
此系統是伺服馬達接受到位移指令脈衝後,立即驅動工作台位移,而位移動作 後,經由位置檢出器之檢測與回饋(feed back),系統能得知位移動作結果與指令 指之關係,若兩者間有誤差產生時,經由一放大器繼續驅動伺服馬達運轉,直 到實際位移與指令值相符合為止,如下圖所示。
[size=12.8000001907349px]成型機深度控制機構說明
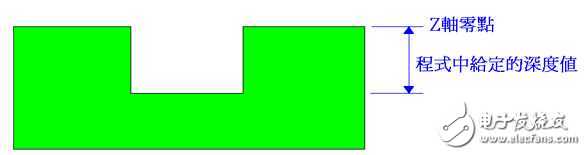
在進行深度控制加工時,深度的定義是由工件的表面為Z軸零點,依程式中 所給定的深度值,往下計算。
[size=12.8000001907349px]成型機深度控制機構說明
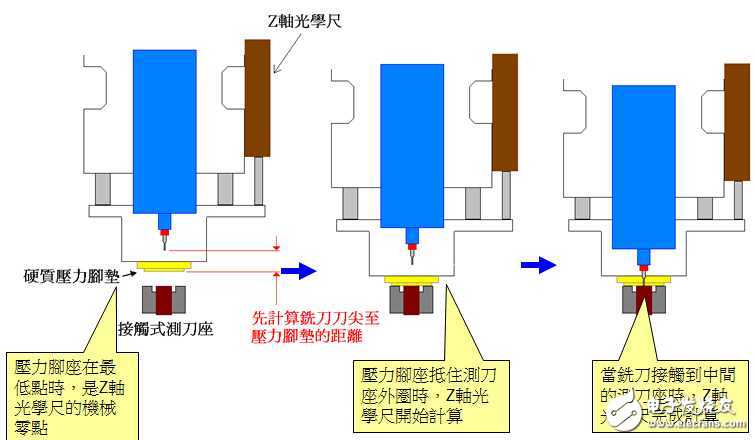
有深度控制的成型機,主要是在Spindle的鞍座旁裝置一個Z軸光學尺,此光 學尺是要偵測壓力腳與鞍座的相對運動,而達到深度控制的目的。
[size=12.8000001907349px]成型機深度控制機構說明
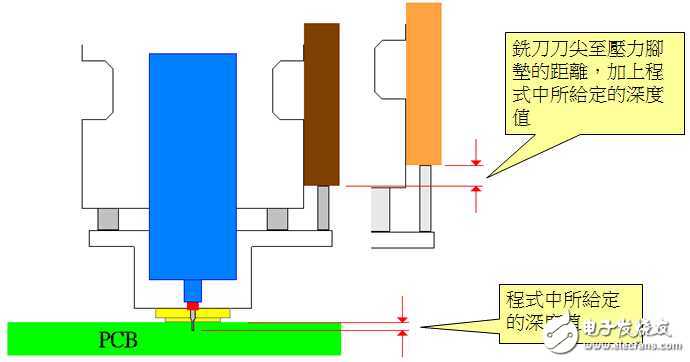
在進行深度控制加工時,當壓力腳墊接觸至工件的表面的瞬間,Z軸光學尺 開始計算(銑刀刀尖至壓力腳墊的距離,加上程式中所給定的深度值),來控 制Spindle下降的距離。
成型機的測刀裝置不適合直接做深度控制加工的原因
[size=12.8000001907349px]因成型機的測刀裝置的偵測PASS範圍為 ± 2mil,而銑刀上環深度,每支也都會有誤差,故不適合直接做 深度控制加工。