第057例:CAN-双机通信测试
时间:10-02
整理:3721RD
点击:
【HAL库每天一例】系列例程从今天开始持续更新。
我们将坚持每天至少发布一个基于YS-F1Pro开发板的HAL库例程,
该系列例程将带领大家从零开始使用HAL库,后面会持续添加模块应用例程。
同样的,我们还程序发布基于HAL库的指导文档和视频教程,欢迎持续关注,并提出改进意见。
例程下载:
资料包括程序、相关说明资料以及软件使用截图
链接:http://pan.baidu.com/s/1i574oPv
密码:r3s3
(硬石YS-F1Pro开发板HAL库例程持续更新\1. 软件设计之基本裸机例程(HAL库版本)\YSF1_HAL-057. CAN-双机通信测试)
/**
******************************************************************************
* 硬石YS-F1Pro开发板例程功能说明
*
* 例程名称: CAN-主机端
*
******************************************************************************
* 说明:
* 本例程配套硬石stm32开发板YS-F1Pro使用。
*
* 淘宝:
* 论坛:http://www.ing10bbs.com
* 版权归硬石嵌入式开发团队所有,请勿商用。
******************************************************************************
*/
【1】例程简介
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由以研发和生产汽车电子
产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的
现场总线之一。 在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域
网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
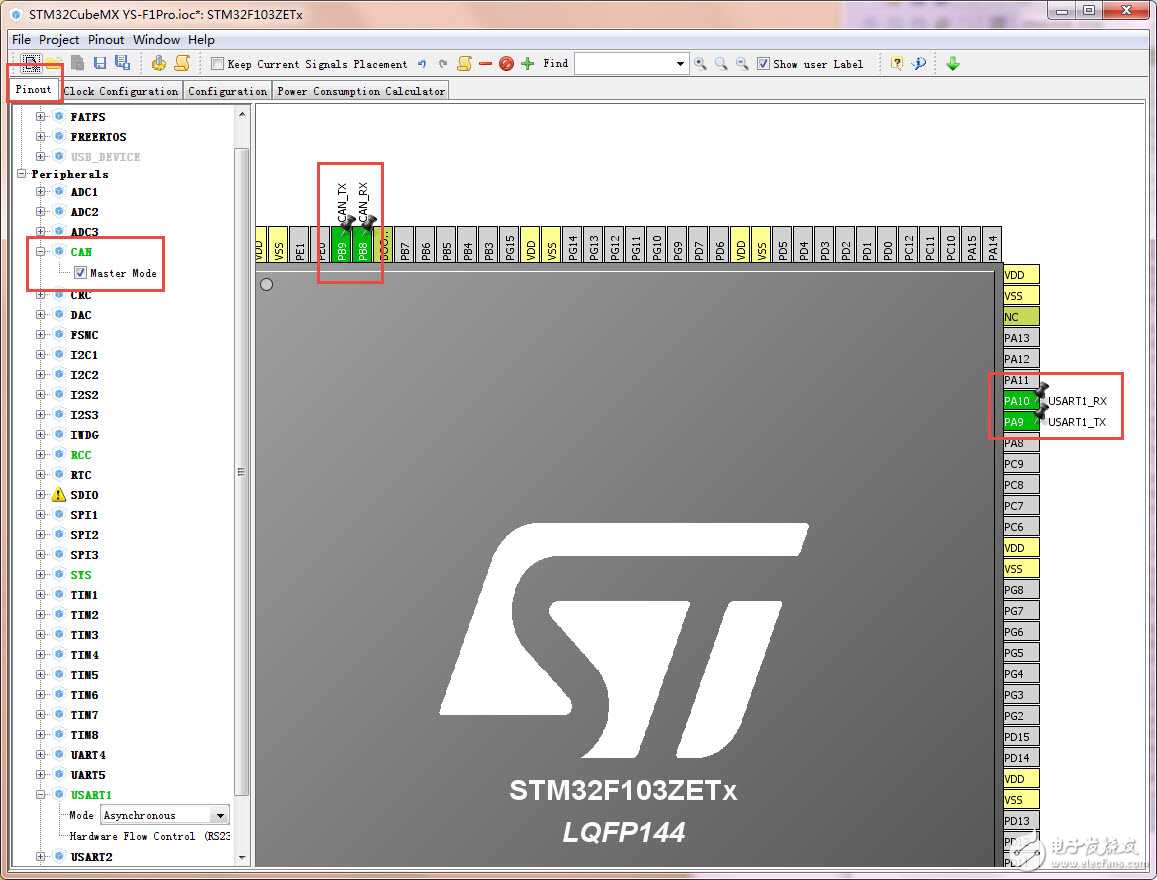
【2】跳线帽情况
******* 为保证例程正常运行,必须插入以下跳线帽 **********
丝印编号 IO端口 目标功能引脚 出厂默认设置
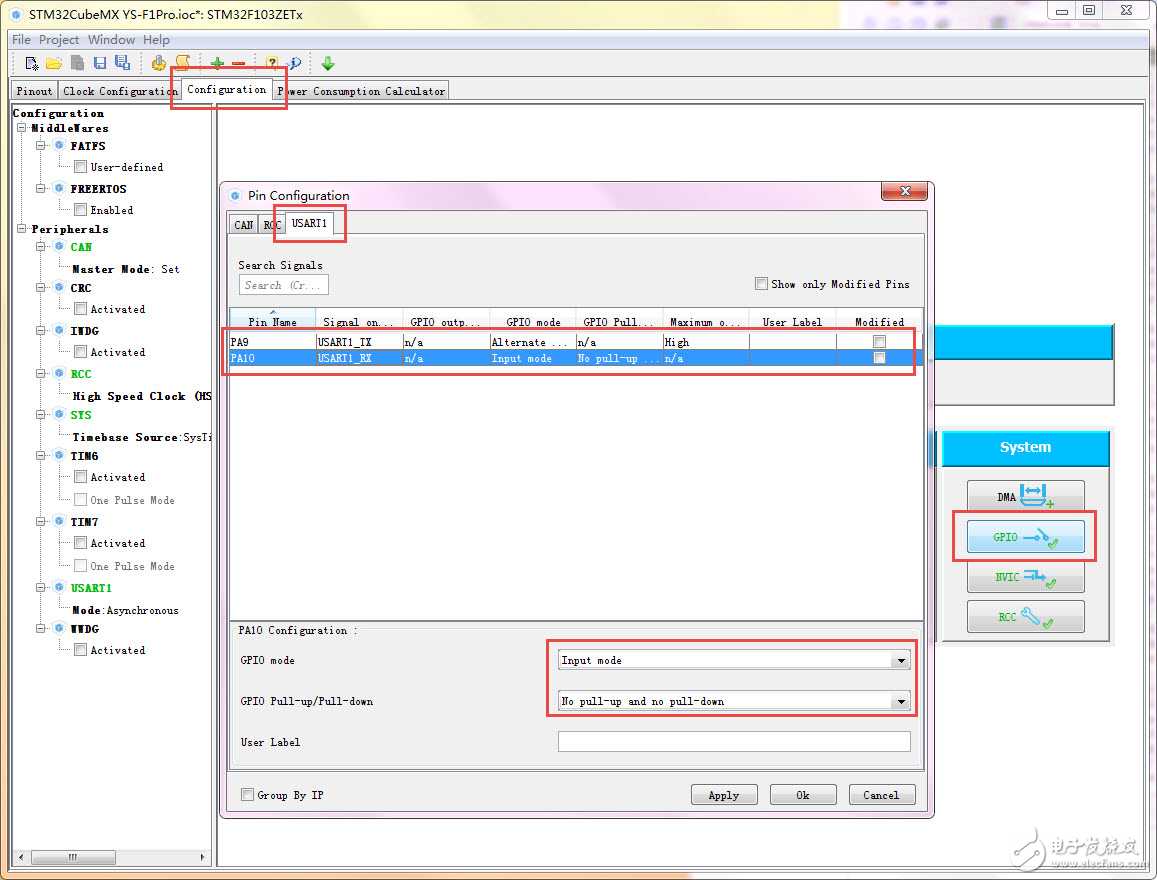
JP1 PA10 TXD(CH340G) 已接入
JP2 PA9 RXD(CH340G) 已接入
【3】操作及现象
使用两根导线连接两个开发板上的CN9接收端子,对应连接“CANL -- CANL”和“CANH -- CANH”,
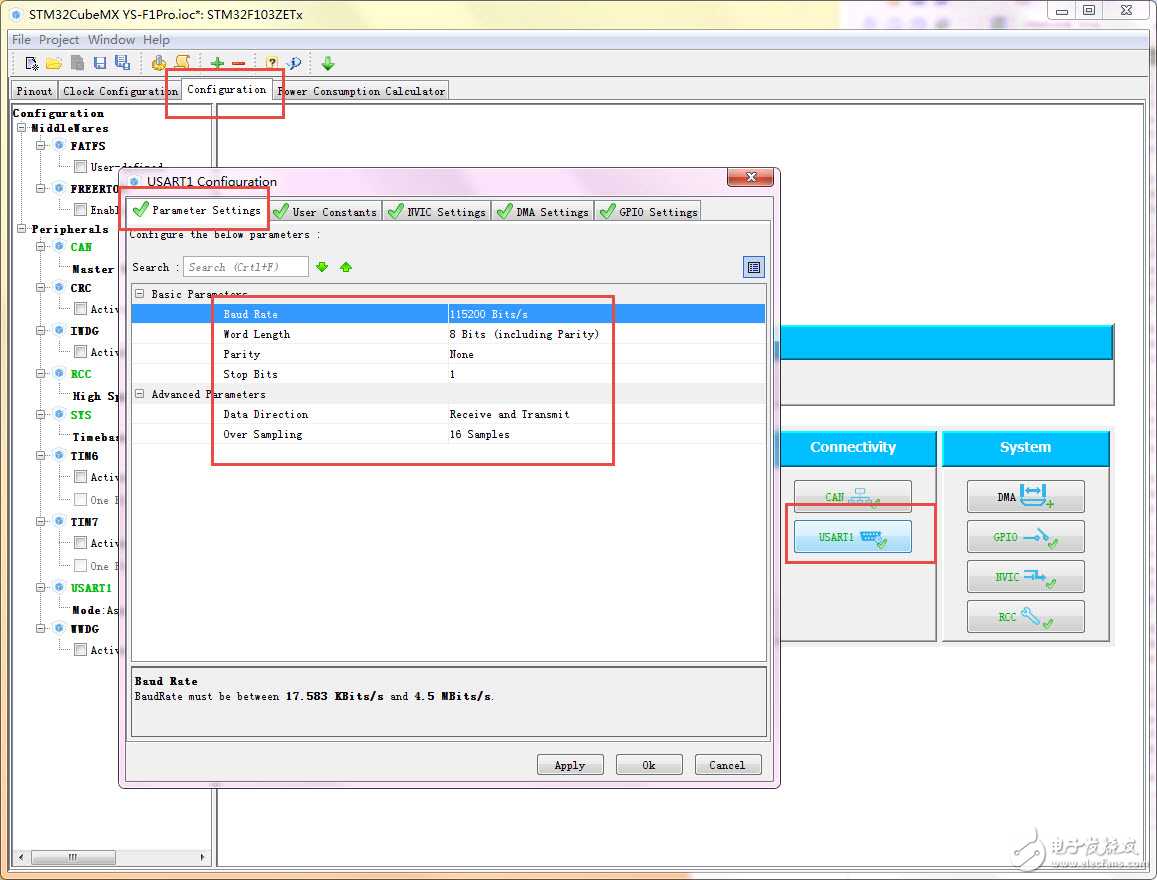
使用开发板配套的MINI USB线连接到开发板标示“调试串口”字样的MIMI USB接口(需要安装驱动),
在电脑端打开串口调试助手工具,设置参数为115200 8-N-1。下载完程序之后,在串口调试助手窗
口可接收到信息。
/******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****/


bsp_CAN.h文件内容
bsp_CAN.c文件内容

我们将坚持每天至少发布一个基于YS-F1Pro开发板的HAL库例程,
该系列例程将带领大家从零开始使用HAL库,后面会持续添加模块应用例程。
同样的,我们还程序发布基于HAL库的指导文档和视频教程,欢迎持续关注,并提出改进意见。
例程下载:
资料包括程序、相关说明资料以及软件使用截图
链接:http://pan.baidu.com/s/1i574oPv
密码:r3s3
(硬石YS-F1Pro开发板HAL库例程持续更新\1. 软件设计之基本裸机例程(HAL库版本)\YSF1_HAL-057. CAN-双机通信测试)
/**
******************************************************************************
* 硬石YS-F1Pro开发板例程功能说明
*
* 例程名称: CAN-主机端
*
******************************************************************************
* 说明:
* 本例程配套硬石stm32开发板YS-F1Pro使用。
*
* 淘宝:
* 论坛:http://www.ing10bbs.com
* 版权归硬石嵌入式开发团队所有,请勿商用。
******************************************************************************
*/
【1】例程简介
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由以研发和生产汽车电子
产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的
现场总线之一。 在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域
网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
【2】跳线帽情况
******* 为保证例程正常运行,必须插入以下跳线帽 **********
丝印编号 IO端口 目标功能引脚 出厂默认设置
JP1 PA10 TXD(CH340G) 已接入
JP2 PA9 RXD(CH340G) 已接入
【3】操作及现象
使用两根导线连接两个开发板上的CN9接收端子,对应连接“CANL -- CANL”和“CANH -- CANH”,
使用开发板配套的MINI USB线连接到开发板标示“调试串口”字样的MIMI USB接口(需要安装驱动),
在电脑端打开串口调试助手工具,设置参数为115200 8-N-1。下载完程序之后,在串口调试助手窗
口可接收到信息。
/******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****/
bsp_CAN.h文件内容
- #ifndef __BSP_CAN_H__
- #define __BSP_CAN_H__
- /* 包含头文件 ----------------------------------------------------------------*/
- #include "stm32f1xx_hal.h"
- #include <stdio.h>
- /* 类型定义 ------------------------------------------------------------------*/
- /* 宏定义 --------------------------------------------------------------------*/
- #define CANx CAN1
- #define CANx_CLK_ENABLE() __HAL_RCC_CAN1_CLK_ENABLE()
- #define CANx_FORCE_RESET() __HAL_RCC_CAN1_FORCE_RESET()
- #define CANx_RELEASE_RESET() __HAL_RCC_CAN1_RELEASE_RESET()
- #define CANx_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
- #define CANx_GPIO_PORT GPIOB
- #define CANx_TX_PIN GPIO_PIN_8
- #define CANx_RX_PIN GPIO_PIN_9
- /* Definition for AFIO Remap */
- #define CANx_AFIO_REMAP_CLK_ENABLE() __HAL_RCC_AFIO_CLK_ENABLE()
- #define CANx_AFIO_REMAP_RX_TX_PIN() __HAL_AFIO_REMAP_CAN1_2()
- #define CANx_RX_IRQn USB_LP_CAN1_RX0_IRQn
- /* 扩展变量 ------------------------------------------------------------------*/
- extern CAN_HandleTypeDef hCAN;
- /* 函数声明 ------------------------------------------------------------------*/
- void MX_CAN_Init(void);
- #endif /* __BSP_CAN_H__ */
- /******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****/
bsp_CAN.c文件内容
- /**
- ******************************************************************************
- * 文件名程: bsp_CAN.c
- * 作 者: 硬石嵌入式开发团队
- * 版 本: V1.0
- * 编写日期: 2015-10-04
- * 功 能: CAN通信底层驱动实现
- ******************************************************************************
- * 说明:
- * 本例程配套硬石stm32开发板YS-F1Pro使用。
- *
- * 淘宝:
- * 论坛:http://www.ing10bbs.com
- * 版权归硬石嵌入式开发团队所有,请勿商用。
- ******************************************************************************
- */
- /* 包含头文件 ----------------------------------------------------------------*/
- #include "CAN/bsp_CAN.h"
- /* 私有类型定义 --------------------------------------------------------------*/
- /* 私有宏定义 ----------------------------------------------------------------*/
- /* 私有变量 ------------------------------------------------------------------*/
- CAN_HandleTypeDef hCAN;
- static CanTxMsgTypeDef TxMessage;
- static CanRxMsgTypeDef RxMessage;
- /* 扩展变量 ------------------------------------------------------------------*/
- /* 私有函数原形 --------------------------------------------------------------*/
- /* 函数体 --------------------------------------------------------------------*/
- /**
- * 函数功能: CAN通信初始化
- * 输入参数: 无
- * 返 回 值: 无
- * 说 明:无
- */
- void MX_CAN_Init(void)
- {
- CAN_FilterConfTypeDef sFilterConfig;
-
- /*CAN单元初始化*/
- hCAN.Instance = CANx; // CAN外设
- hCAN.pTxMsg = &TxMessage;
- hCAN.pRxMsg = &RxMessage;
-
- hCAN.Init.Prescaler = 4; // BTR-BRP 波特率分频器 定义了时间单元的时间长度 36/(1+6+3)/4=0.9Mbps
- hCAN.Init.Mode = CAN_MODE_NORMAL; // 正常工作模式
- hCAN.Init.SJW = CAN_SJW_2TQ; // BTR-SJW 重新同步跳跃宽度 2个时间单元
- hCAN.Init.BS1 = CAN_BS1_6TQ; // BTR-TS1 时间段1 占用了6个时间单元
- hCAN.Init.BS2 = CAN_BS2_3TQ; // BTR-TS1 时间段2 占用了3个时间单元
- hCAN.Init.TTCM = DISABLE; // MCR-TTCM 关闭时间触发通信模式使能
- hCAN.Init.ABOM = ENABLE; // MCR-ABOM 自动离线管理
- hCAN.Init.AWUM = ENABLE; // MCR-AWUM 使用自动唤醒模式
- hCAN.Init.NART = DISABLE; // MCR-NART 禁止报文自动重传 DISABLE-自动重传
- hCAN.Init.RFLM = DISABLE; // MCR-RFLM 接收FIFO 锁定模式 DISABLE-溢出时新报文会覆盖原有报文
- hCAN.Init.TXFP = DISABLE; // MCR-TXFP 发送FIFO优先级 DISABLE-优先级取决于报文标示符
- HAL_CAN_Init(&hCAN);
-
- /*CAN过滤器初始化*/
- sFilterConfig.FilterNumber = 0; //过滤器组0
- sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; //工作在标识符屏蔽位模式
- sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; //过滤器位宽为单个32位。
- /* 使能报文标示符过滤器按照标示符的内容进行比对过滤,扩展ID不是如下的就抛弃掉,是的话,会存入FIFO0。 */
-
- sFilterConfig.FilterIdHigh = (((uint32_t)0x1314<<3)&0xFFFF0000)>>16; //要过滤的ID高位
- sFilterConfig.FilterIdLow = (((uint32_t)0x1314<<3)|CAN_ID_EXT|CAN_RTR_DATA)&0xFFFF; //要过滤的ID低位
- sFilterConfig.FilterMaskIdHigh = 0xFFFF; //过滤器高16位每位必须匹配
- sFilterConfig.FilterMaskIdLow = 0xFFFF; //过滤器低16位每位必须匹配
- sFilterConfig.FilterFIFOAssignment = 0; //过滤器被关联到FIFO 0
- sFilterConfig.FilterActivation = ENABLE; //使能过滤器
- sFilterConfig.BankNumber = 14;
- HAL_CAN_ConfigFilter(&hCAN, &sFilterConfig);
- }
- void HAL_CAN_MspInit(CAN_HandleTypeDef* hcan)
- {
- GPIO_InitTypeDef GPIO_InitStruct;
- if(hcan->Instance==CANx)
- {
- /* 使能外设时钟 */
- CANx_CLK_ENABLE();
- CANx_GPIO_CLK_ENABLE();
-
- /**CAN GPIO Configuration
- PB8 ------> CAN_RX
- PB9 ------> CAN_TX
- */
- GPIO_InitStruct.Pin = CANx_TX_PIN;
- GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
- GPIO_InitStruct.Pull = GPIO_NOPULL;
- HAL_GPIO_Init(CANx_GPIO_PORT, &GPIO_InitStruct);
- GPIO_InitStruct.Pin = CANx_RX_PIN;
- GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
- HAL_GPIO_Init(CANx_GPIO_PORT, &GPIO_InitStruct);
- CANx_AFIO_REMAP_CLK_ENABLE();
- CANx_AFIO_REMAP_RX_TX_PIN();
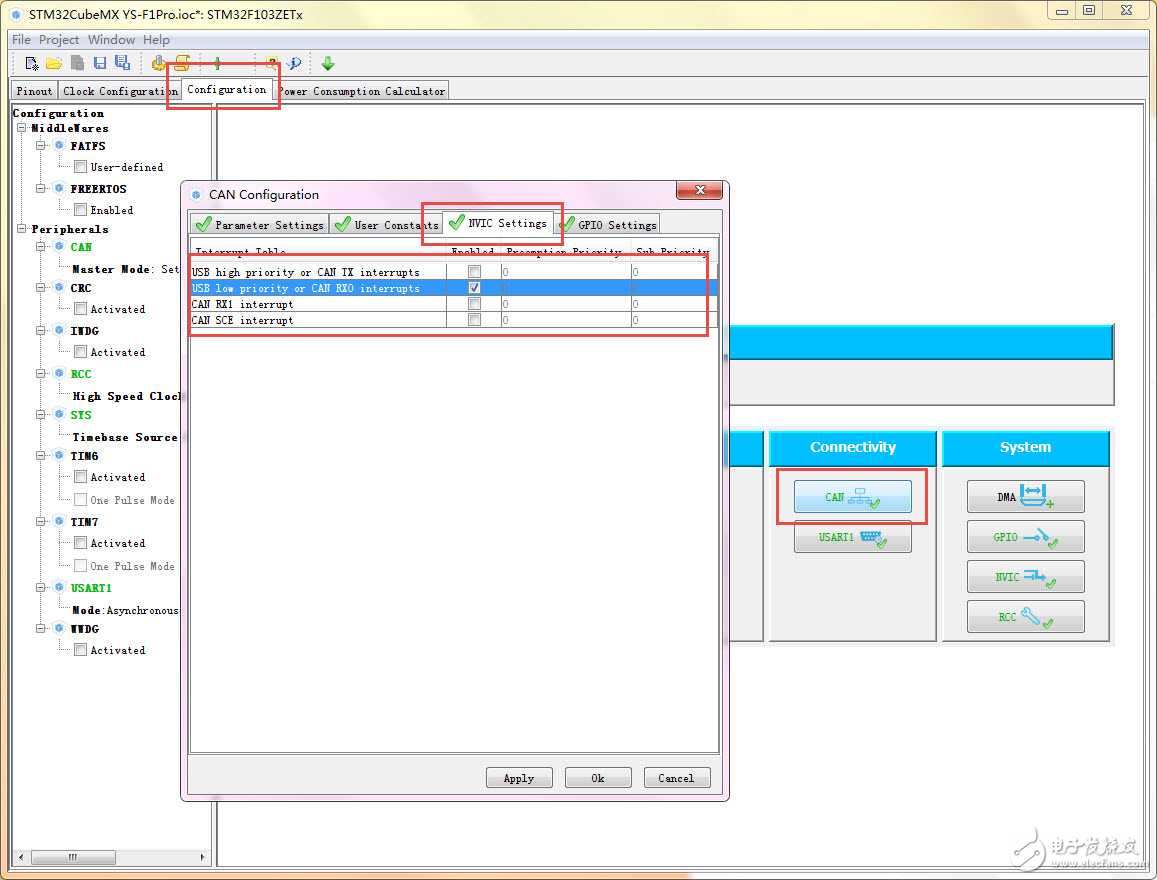
- /* 外设中断优先级及使能 */
- HAL_NVIC_SetPriority(CANx_RX_IRQn, 0, 0);
- HAL_NVIC_EnableIRQ(CANx_RX_IRQn);
- /* USER CODE BEGIN CAN1_MspInit 1 */
- /* USER CODE END CAN1_MspInit 1 */
- }
- }
- void HAL_CAN_MspDeInit(CAN_HandleTypeDef* hcan)
- {
- if(hcan->Instance==CANx)
- {
- CANx_FORCE_RESET();
- CANx_RELEASE_RESET();
-
- /**CAN GPIO Configuration
- PB8 ------> CAN_RX
- PB9 ------> CAN_TX
- */
- HAL_GPIO_DeInit(CANx_GPIO_PORT, CANx_TX_PIN|CANx_RX_PIN);
- /* 禁用外设中断 */
- HAL_NVIC_DisableIRQ(CANx_RX_IRQn);
- }
- }
- /******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****/
路过看见,支持一下!顶!顶!顶!