mpu6050的卡曼滤波·
时间:10-02
整理:3721RD
点击:
请教大家几个问题
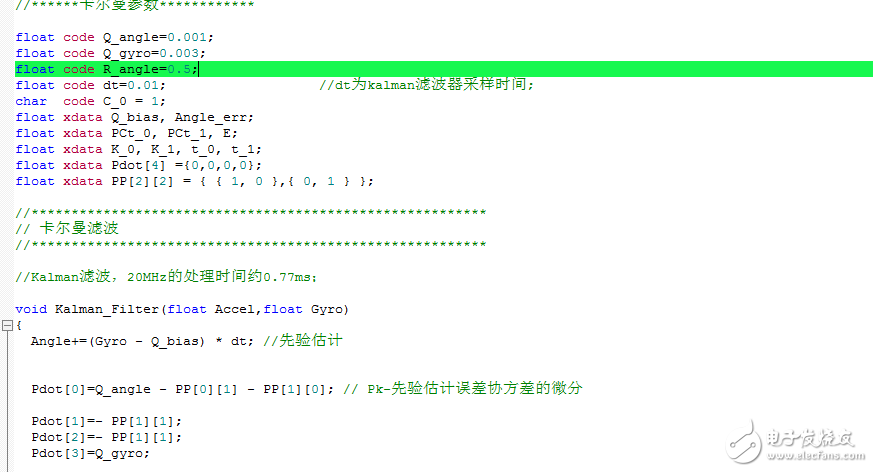
1.Q_bias代表什么
2.为啥PP[2][2] = { { 1, 0 },{ 0, 1 } }; 数组参数是怎么确定的
3. 解释一下为什么 Pdot[0]=Q_angle - PP[0][1] - PP[1][0]; Pdot[1]=- PP[1][1];
Pdot[2]=- PP[1][1];
Pdot[3]=Q_gyro;
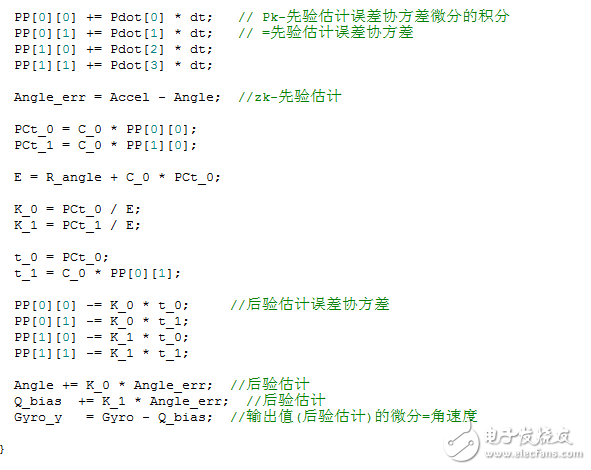
4.PP[0][0],PP[0][1],PP[1][0],PP[1][1]哪个是前一次和后一次代表角度的协方差,哪个是前一次和后一次角加速度的协方差
求大神们给个解释,不胜感激!
1.Q_bias代表什么
2.为啥PP[2][2] = { { 1, 0 },{ 0, 1 } }; 数组参数是怎么确定的
3. 解释一下为什么 Pdot[0]=Q_angle - PP[0][1] - PP[1][0]; Pdot[1]=- PP[1][1];
Pdot[2]=- PP[1][1];
Pdot[3]=Q_gyro;
4.PP[0][0],PP[0][1],PP[1][0],PP[1][1]哪个是前一次和后一次代表角度的协方差,哪个是前一次和后一次角加速度的协方差
求大神们给个解释,不胜感激!
以上程序是用于两轮自平衡车的
Q_bias只是一个状态变量
啊发发无法无法无法
阿十五打法俄方色
高深,云雾中!
小编这个程序懂了吗?求教~
正在学,不明白,求教!
做过智能车也用过这个程序..但是现在我还没搞懂这个 来个大神来解释下吧