求助,关于使用ucc28950芯片的移向全桥整流电路输出电流反馈问题
采用ucc28950移向全桥整流电路做充电机,输出桥式整流后给电池充电,电流闭环控制。。。控制范围是0—6A,现在设置电流稳定到1A,电压跟随电池电压。当输出电流达到1A时,PWM停止驱动,电流下降到0时,PWM继续驱动,驱动过程是从启动状态到逐渐输出最大占空比又减小占空比直到停止驱动。。。。看手册好像是猝发模式? 请问,应该如何解决,使电流波动不那么大,最好持续稳定。
副边是同步整流还是二极管整流?如果是同步整流的话,你看看是不是1A的时候进入了DCM状态造成的。
副边是桥式整流,在ucc28950芯片外围电路已经设置禁用断续模式了
我说的断续方式,是电感电流进入DCM,跟你设置没有任何关系。不过如果是二极管整流,进入断续也不应该是问题,能否提供你电路图看看?
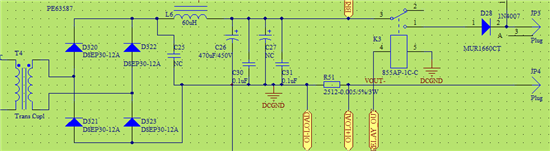
上图是桥式整流输出原理图,电感L6我选的100uh,变压器前端就是移向全桥整流了
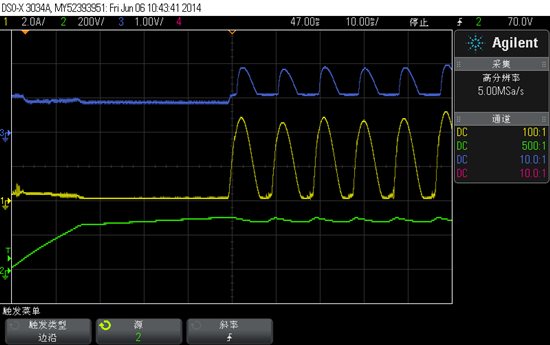
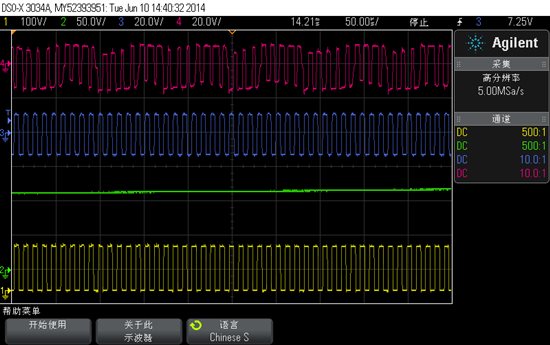
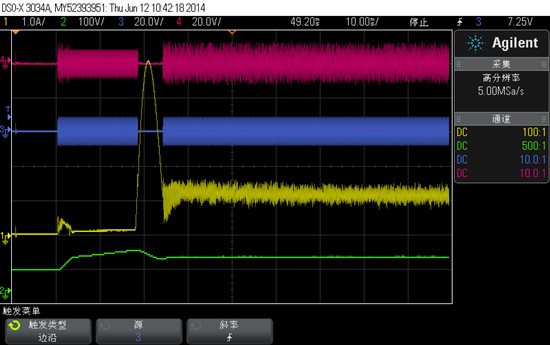
上图黄色的是一mos管DS端电压,2是VOUT,3,4mos管两下桥臂驱动
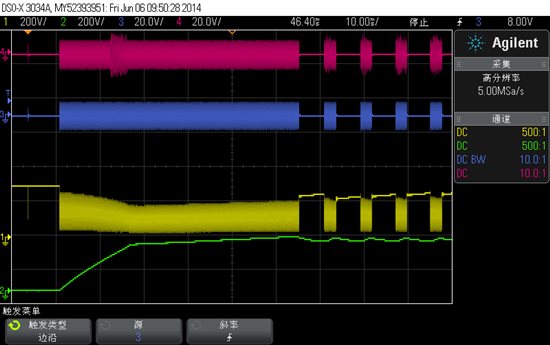
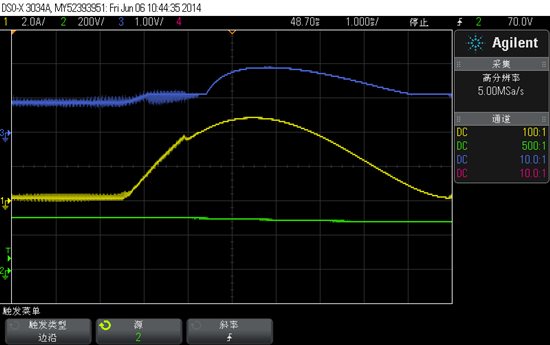
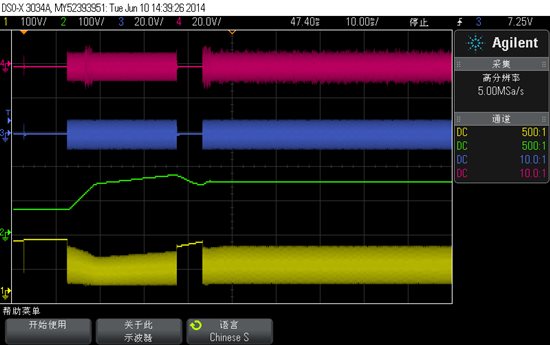
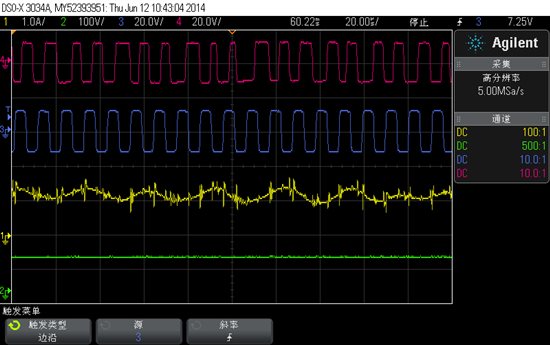
上图中1为输出电流,2输出电压,3,4驱动。。。下图是放大后
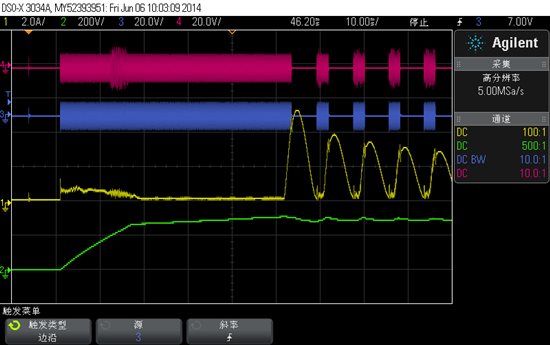
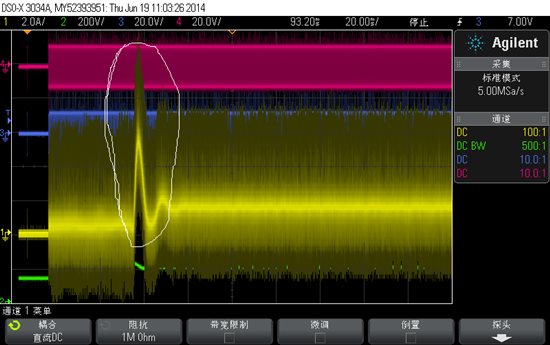
上图中3是28950 EA-端电压,下图 放大后
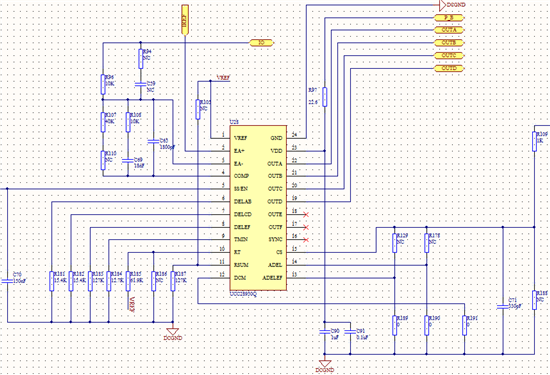
ucc28950外围电路,电流采样电阻为0.005欧姆,采集1A电流,0.005V,然后放大50倍,0.25V在加上基准电压1.25V,所以送入IO引脚的电压是1.5V,经电阻分压后到达EA-电压为1.2V,IREF给的参考电压为1.2V
1、进入IO后哪里有分压?谁跟谁分压?
2、环路的低频增益太低了,你将与C69串联的那个10K的电阻改成100K的试试。
是有分压的,那个图有一部分电路是没用的,截图的时候被我一不小心把地给删了。
好的
你好,我看你的电流波形是衰减的,震荡到最后是什么现象,是在恢复稳定还是保持某一幅值一直震荡。
lin liu2
上图中1为输出电流,2输出电压,3,4驱动。。。下图是放大后
这个是我100ms的截图,看起来像是保持某一赋值一直震荡
我把10K电阻改成100K,在低压时不震荡了。我是从低电压慢慢往上调的,例如输入100V,输出100V这样。。。但当我把电压加到输入350V,输出377V的时候,震荡又开始了。然后我把电阻换成130K,加同样的输入350V,输出377V,上电直接炸mos管,好像是两个管子上下桥臂短路。。
输入350V输出377V的时候,用10K电阻上电不炸MOS管?建议你将IC的软启动电容加大试试。
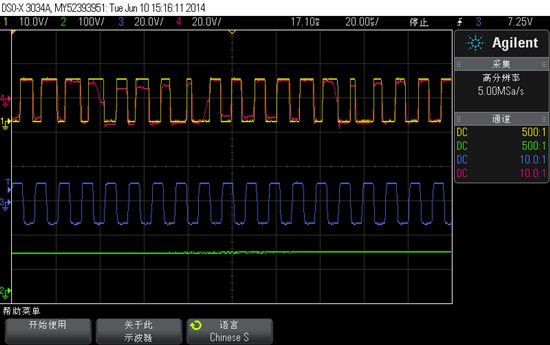
电压升高的时候,驱动波形很乱,第三张图黄色驱动是ucc28950输出的驱动,红色的是mos管GS极驱动波形,看图上占空比变化不规则,这是干扰的问题还是环路补偿没调好的问题啊? 要是环路补偿的问题我应该更改哪些点呢 ?
能不能传个完整的PDF原理图上来,参数要跟实物一样的?另外你的误差放大器输出波形什么样?
6428.DCpower.pdf4682.ACDC.pdf
上面这两个附件是28950控制部分加功率部分的电路图
下面的截图都是按照上面原理图中参数测得的
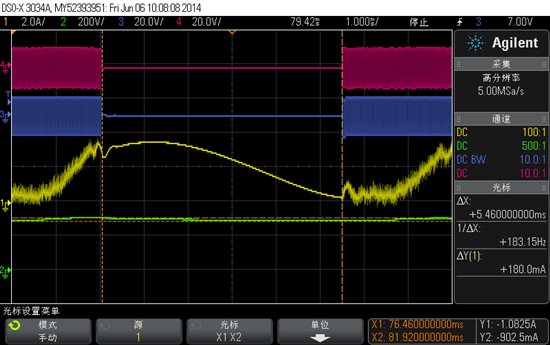
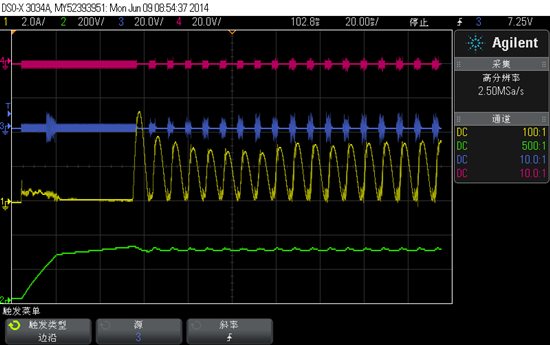
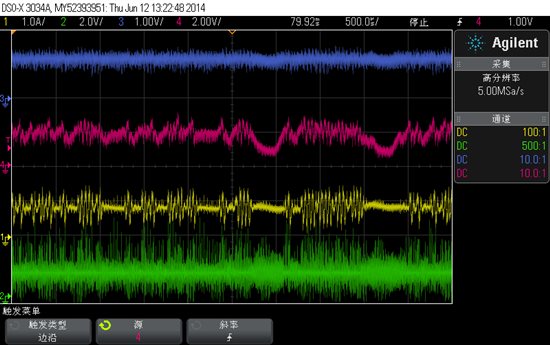
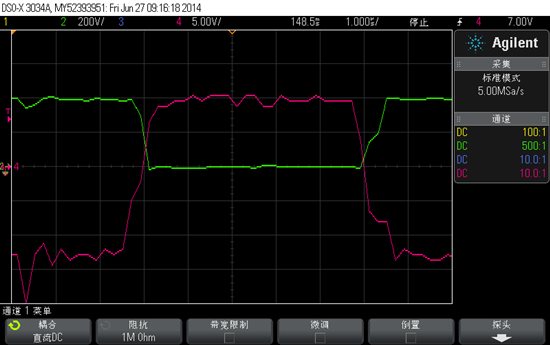
下图中 蓝:误差放大器负极性输入;红:误差放大器输出; 黄:功率级输出电流; 绿:误差放大器正极性输入
在输入电压100V,输出电压100V时测得的波形截图

对应的驱动波形是这样的,1 输出电流,2 输出电压,3、4驱动,,4是参与相移的驱动
不一定好用,你可以试试,谢谢。
1.采样输出电流的电阻上面并联一个100pF电容看有没有改善
2.comp脚与DGND之间并联一个100pF的电容看有没有改善
试过了,也没什么改善
UCC28950采用24引脚封装其特点如下
1支持优化计时的同步整流器输出可最大限度地降低典型传播延迟的体二极管传导损耗从而确保高效性
2UCC28950具备的高级电源管理功能可在不同的启动或负载条件下更改工作模式并支持猝发模式相对于非环保模式解决方案而言可将轻负载或空载条件下的效率提升多达70%。UCC28950的可编程斜坡补偿可实现电流或电压模式控制从而提高系统灵活性
3具备启用功能的软启动使UCC28950能以更高级别的系统控制初始化启动
4带90度相移的同步输入与同步输出功能可实现两个并行电源的交叉工作使输入与输出纹波电流下降50%至100%不等。较低的输入和输出纹波电流使设计人员能使用更小的低成本输入和输出电容。
看看资料吧
UCC28950是TI公司进一步改进的相移全桥控制IC,它比原有标准型UCC2895主要改进为ZVS能力范围加宽,对二次侧同步整流直接控制,提高了轻载空载转换效率,而且此时可以ON/OFF控制同步整流成为绿色产品。既可以作电流型控制,也可以作电压型控制。增加了闭环软启动及使能功能。低启动电流,逐个周期式限流过流保护,开关频可达1MHz。
通过你的描述,控制和bang-bang控制类似。如果频率比较高的话,纹波应该不会那么大。要不然想办法增加PI环节,要不然就提高频率,做好滤波。
上传下原理图上来看看才好分析问题,会不会环路的低频增益太低了?
首先要判断一下此驱动芯片有没有损坏的可能性!
然后在看一下这个芯片是不是进入了峰值限流的一种工作状态?
看一下电流采样的电阻值是否选得合适?
首先要确认静态波形正确,再开机慢慢加载,监视频率与DUTY是否OK?
PWM驱动如果频率太低的话,会造成输出电压纹波比较大。可以尝试增加驱动频率,同时注意输出电压滤波
输出电流降低到1A的时候,要用示波器看下输出电流是震荡还是直接下降到0A?
输出电流降低到1A的时候,要用示波器看下输出电流是震荡还是直接下降到0A?
电流波动大的话考虑一下pi调节试试看,加一些滤波电容电感会不会好一些!
加一些滤波电容电感看是否有改善,我觉得是电路环路没做好
原理图在帖子里,仔细看下就找到了
我现在改成Type 1型补偿了,变压器输出部分电路用洞洞板重新焊了一个,准备改电流采样部分,把采样电阻增大试试
首先检查一下电源的环路设计有没有问题,是不是环路的某一个参数还没搞好,导致模块工作在异常状态!
电子负载的问题。刚开始启动的时候电子负载使电流突然升高,导致整个后边都不好了。
UCC28950PW和LM5045MH都各有啥优点缺点?
都是全桥的,一个是移相的.都带MOS驱动.
占空比是固定的,通过相移来控制输出,所以在空载时相移应该最大,随着负载的增大相移越来越小。
UCC28950规格为6路输出,分别是A,B,C,D,E,F,规格书中给出A,B,C,D做全桥PWM驱动,E,F做同步整流驱动,请问,在设计时,不使用同步整流,E,F可以当作A,B,C,D一样混合使用吗?死区时间如何控制?
不可以的,E,F两路理论上是与滞后臂的两个管子同时导通与关断,或在这之前
你想用E,F两路做什么信号控制?
|
“E,F两路理论上是与滞后臂的两个管子同时导通与关断” 如果B,D为滞后臂,那E,F可以和B,D互换使用吗? 互换是为了方便布线,另外2路可以用来同时做一路DC-DC吗? |
那你一定會損失一些死區時間
原本的死區時間 再加上EF訊號與ABCD 訊號的死區時間
| 死区应该好解决,把E,F全部经过反相器反相再驱动,死区就可以设置只有1个了吧 |
又来新的问题了,未实现软开关,不软开,像这种情况只调死区时间可以解决吗?