CC2530串口打印出错的问题
时间:10-02
整理:3721RD
点击:
从串口中得到数据,先存入环形数组,再从环形数组中读取数字,分析之后通过原串口发送,利用串口助手显示在电脑上。可是存在有的数据能够正常打印,有的数据却不行的问题。
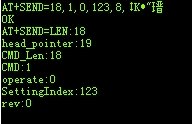
利用串口助手发送数据为:AT+SEND=18,1,0,123,8,00 12 4B 00 07 22 AC 92
环形数组存储和读取都没有问题
//读取尾指针指向的的地址中存储的需要调用的命令长度
CMD_Len = *(UART_StoreBuf + UART_StoreBuf_tail_pointer);
UART_StoreBuf_tail_pointer++;
UART_StoreBuf_tail_pointer %= UART_StoreBuf_Len_MAX;
sprintf(temp,"CMD_Len:%d\r\n",CMD_Len);
HalUARTWrite(0, temp, strlen(temp));
//将环形数组中的命令读取拼接出来,存入命令分析缓存区
if((UART_StoreBuf_tail_pointer + CMD_Len) <= UART_StoreBuf_Len_MAX)
{
memcpy(UartData_Behavior_Buf,UART_StoreBuf + UART_StoreBuf_tail_pointer,CMD_Len);
}else
{
temp1 = UART_StoreBuf_Len_MAX - UART_StoreBuf_tail_pointer;
memcpy(UartData_Behavior_Buf,UART_StoreBuf + UART_StoreBuf_tail_pointer, temp1);
temp2 = CMD_Len - temp1;
memcpy(UartData_Behavior_Buf + temp1,UART_StoreBuf,temp2);
}
//对命令分析缓存区中的数据经行分析
p1 = strchr((const char*)UartData_Behavior_Buf,',');
memcpy(num_str,UartData_Behavior_Buf,1);
CMD = atoi(num_str);
sprintf(temp,"CMD:%d\r\n",CMD);
HalUARTWrite(0, temp, strlen(temp));
if(CMD == 1)
{
p2 = strchr((const char*)(p1+1),',');
memcpy(num_str,p1+1,p2-p1-1);
operate = atoi(num_str);
sprintf(temp,"operate:%d\r\n",operate);
HalUARTWrite(0, temp, strlen(temp));
p3 = strchr((const char*)(p2+1),',');
memcpy(num_str,p2+1,p3-p2-1);
SettingIndex = atoi(num_str);
sprintf(temp,"SettingIndex:%d\r\n",SettingIndex);
HalUARTWrite(0, temp, strlen(temp));
p4 = strchr((const char*)(p3+1),',');
memcpy(num_str,p3+1,p4-p3-1);
data_len = atoi(num_str);
sprintf(temp,"data_len:%d\r\n",data_len);
HalUARTWrite(0, temp, strlen(temp));
memcpy(Data,p4+1,8);
sprintf(temp,"Data:%X\r\n",Data[7]);
HalUARTWrite(0, temp, strlen(temp));
//HalUARTWrite(0, "WhiteList\r\n", 11);
//调用数据处理函数
rev = Data_Process(operate,data_len,WhiteList_Data);
sprintf(temp,"rev:%d\r\n",rev);
HalUARTWrite(0, temp, strlen(temp));
if(rev)
{
HalUARTWrite(0, "Update tail pointer\r\n", 21);
HalLcdWriteString( "Update", HAL_LCD_LINE_1 );
//发送完成,更新尾指针
UART_StoreBuf_tail_pointer += CMD_Len;
UART_StoreBuf_tail_pointer %= UART_StoreBuf_Len_MAX;
}else
{
UART_StoreBuf_tail_pointer--;
HalLcdWriteString( "fail", HAL_LCD_LINE_1 );
sprintf(temp,"tail_pointer:%d\r\n",UART_StoreBuf_tail_pointer);
HalUARTWrite(0, temp, strlen(temp));
}
HalUARTWrite(0, "fail!\r\n", 7);
}
求指导!!谢谢!data_len和Data没有打印,后面的尾指针也没有打印!
利用串口助手发送数据为:AT+SEND=18,1,0,123,8,00 12 4B 00 07 22 AC 92
环形数组存储和读取都没有问题
//读取尾指针指向的的地址中存储的需要调用的命令长度
CMD_Len = *(UART_StoreBuf + UART_StoreBuf_tail_pointer);
UART_StoreBuf_tail_pointer++;
UART_StoreBuf_tail_pointer %= UART_StoreBuf_Len_MAX;
sprintf(temp,"CMD_Len:%d\r\n",CMD_Len);
HalUARTWrite(0, temp, strlen(temp));
//将环形数组中的命令读取拼接出来,存入命令分析缓存区
if((UART_StoreBuf_tail_pointer + CMD_Len) <= UART_StoreBuf_Len_MAX)
{
memcpy(UartData_Behavior_Buf,UART_StoreBuf + UART_StoreBuf_tail_pointer,CMD_Len);
}else
{
temp1 = UART_StoreBuf_Len_MAX - UART_StoreBuf_tail_pointer;
memcpy(UartData_Behavior_Buf,UART_StoreBuf + UART_StoreBuf_tail_pointer, temp1);
temp2 = CMD_Len - temp1;
memcpy(UartData_Behavior_Buf + temp1,UART_StoreBuf,temp2);
}
//对命令分析缓存区中的数据经行分析
p1 = strchr((const char*)UartData_Behavior_Buf,',');
memcpy(num_str,UartData_Behavior_Buf,1);
CMD = atoi(num_str);
sprintf(temp,"CMD:%d\r\n",CMD);
HalUARTWrite(0, temp, strlen(temp));
if(CMD == 1)
{
p2 = strchr((const char*)(p1+1),',');
memcpy(num_str,p1+1,p2-p1-1);
operate = atoi(num_str);
sprintf(temp,"operate:%d\r\n",operate);
HalUARTWrite(0, temp, strlen(temp));
p3 = strchr((const char*)(p2+1),',');
memcpy(num_str,p2+1,p3-p2-1);
SettingIndex = atoi(num_str);
sprintf(temp,"SettingIndex:%d\r\n",SettingIndex);
HalUARTWrite(0, temp, strlen(temp));
p4 = strchr((const char*)(p3+1),',');
memcpy(num_str,p3+1,p4-p3-1);
data_len = atoi(num_str);
sprintf(temp,"data_len:%d\r\n",data_len);
HalUARTWrite(0, temp, strlen(temp));
memcpy(Data,p4+1,8);
sprintf(temp,"Data:%X\r\n",Data[7]);
HalUARTWrite(0, temp, strlen(temp));
//HalUARTWrite(0, "WhiteList\r\n", 11);
//调用数据处理函数
rev = Data_Process(operate,data_len,WhiteList_Data);
sprintf(temp,"rev:%d\r\n",rev);
HalUARTWrite(0, temp, strlen(temp));
if(rev)
{
HalUARTWrite(0, "Update tail pointer\r\n", 21);
HalLcdWriteString( "Update", HAL_LCD_LINE_1 );
//发送完成,更新尾指针
UART_StoreBuf_tail_pointer += CMD_Len;
UART_StoreBuf_tail_pointer %= UART_StoreBuf_Len_MAX;
}else
{
UART_StoreBuf_tail_pointer--;
HalLcdWriteString( "fail", HAL_LCD_LINE_1 );
sprintf(temp,"tail_pointer:%d\r\n",UART_StoreBuf_tail_pointer);
HalUARTWrite(0, temp, strlen(temp));
}
HalUARTWrite(0, "fail!\r\n", 7);
}
求指导!!谢谢!data_len和Data没有打印,后面的尾指针也没有打印!