zigbee学习笔记1(zstack下串口通信)
时间:10-02
整理:3721RD
点击:
大家好,纠结了很多次,终于想记录下自己最近的zigbee学习过程,由于第一次发帖,经验不足,语言能力不足,敬请谅解。希望对新手有帮助。最近由于需要开发无线传感器网络烟雾探测项目,无线传感网络选择zigbee,本人语言表达能力比较差,但是希望记载下自己的学习经历,分享自己的学习经验,希望能够对大家有帮助,同时也希望大家相互交流。由于笔者,以前没有搞过操作系统,所以可能对于zstack的内部操作系统了解不深,只是记录下自己的学习经历。
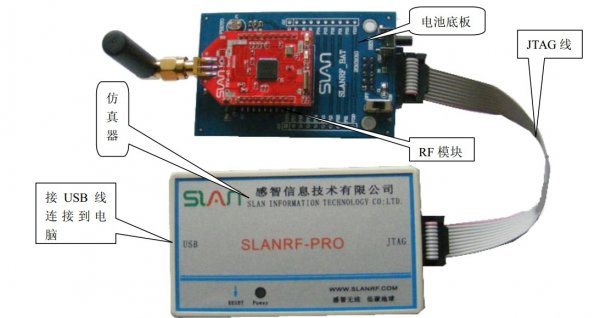
我所用的开发板是成都感知的SLANRF-2530DK系统开发板。
每次新接触到一款单片机,首先就要调通它的串口,
硬件需要:CC2530开发板(选择P0-2,P0-3)串口
PC机
功能:发送任意字符串给单片机,单片机再把数据返回给PC电脑
对于像我这样的新手,拿到zstack之后肯定是无从下手的啦,那么多的文件,还有各种看不懂的函数,参数,说句实话刚开始的时候蛋都碎了,但是首先对于我,我要明白的是,我是来用zigbee的,不是来研究zigbee的,所以我们只需要了解zigbee的执行流程以及,如何像51单片机一样用他,我觉得就可以了。
首先说下执行流程: 1.打开zmain函数,这是整个zstack执行的主函数
2. 定位到 osal_init_system();这个函数是系统初始化函数(zstack嵌入了osal操作系统)
3.go to define of osal_init_system;及打开osal.c文件,找到 osalInitTasks();(任务初始化函数)开始执行任务了,
注册任务:
const pTaskEventHandlerFn tasksArr[] = {
macEventLoop,//MAC任务循环
nwk_event_loop,//网络层任务函数
Hal_ProcessEvent,//硬件层函数
#if defined( MT_TASK )
MT_ProcessEvent,//串口支持层定义
#endif
APS_event_loop,//应用支持层任务事件函数
#if defined ( ZIGBEE_FRAGMENTATION )
APSF_ProcessEvent,
#endif
ZDApp_event_loop,//设备对象层函数
#if defined ( ZIGBEE_FREQ_AGILITY ) || defined ( ZIGBEE_PANID_CONFLICT )
ZDNwkMgr_event_loop,
#endif
GenericApp_ProcessEvent//自己定义的任务处理函数
};
初始化任务:
void osalInitTasks( void )//为各个进程添加任务ID,用作查找任务时用
{
uint8 taskID = 0;
tasksEvents = (uint16 *)osal_mem_alloc( sizeof( uint16 ) * tasksCnt);
osal_memset( tasksEvents, 0, (sizeof( uint16 ) * tasksCnt));
macTaskInit( taskID++ );//MAC层的任务ID号
nwk_init( taskID++ );//网络ID分配
Hal_Init( taskID++ );//硬件ID分配
#if defined( MT_TASK )
MT_TaskInit( taskID++ );
#endif
APS_Init( taskID++ );
#if defined ( ZIGBEE_FRAGMENTATION )
APSF_Init( taskID++ );
#endif
ZDApp_Init( taskID++ );
#if defined ( ZIGBEE_FREQ_AGILITY ) || defined ( ZIGBEE_PANID_CONFLICT )
ZDNwkMgr_Init( taskID++ );
#endif
GenericApp_Init( taskID );//为自己的任务添加ID
}
红颜色的字,是我们需要添加的
4.新建coordinator.c(协调器)
端口注册,初始化,任务注册,任务初始化,串口初始化
uartConfig.configured = TRUE; // 2x30 don't care - see uart driver.
uartConfig.baudRate = HAL_UART_BR_115200;
uartConfig.flowControl = FALSE;
uartConfig.flowControlThreshold = 64; // 2x30 don't care - see uart driver.
uartConfig.rx.maxBufSize = 128; // 2x30 don't care - see uart driver.
uartConfig.tx.maxBufSize = 128; // 2x30 don't care - see uart driver.
uartConfig.idleTimeout = 6; // 2x30 don't care - see uart driver.
uartConfig.intEnable = TRUE; // 2x30 don't care - see uart driver.
uartConfig.callBackFunc = rxCB;(串口回执函数)
HalUARTOpen (0, &uartConfig);
static void rxCB(uint8 port,uint8 event)
{
unsigned char Uartbuf[10];
unsigned char len;
len=HalUARTRead(0,Uartbuf,10);
if(len)
{
HalUARTWrite(0,Uartbuf,len);
len=0;
}
}
5.实现串口发送:
通过HalUARTRead读取pc机发送的数据,然后放到Uartbuf中
通过HalUARTRead发送数据给PC机
6.编译下载程序到CC2530中
以上就是串口的过程,后续还会继续更新,谢谢大家
我所用的开发板是成都感知的SLANRF-2530DK系统开发板。
每次新接触到一款单片机,首先就要调通它的串口,
硬件需要:CC2530开发板(选择P0-2,P0-3)串口
PC机
功能:发送任意字符串给单片机,单片机再把数据返回给PC电脑
对于像我这样的新手,拿到zstack之后肯定是无从下手的啦,那么多的文件,还有各种看不懂的函数,参数,说句实话刚开始的时候蛋都碎了,但是首先对于我,我要明白的是,我是来用zigbee的,不是来研究zigbee的,所以我们只需要了解zigbee的执行流程以及,如何像51单片机一样用他,我觉得就可以了。
首先说下执行流程: 1.打开zmain函数,这是整个zstack执行的主函数
2. 定位到 osal_init_system();这个函数是系统初始化函数(zstack嵌入了osal操作系统)
3.go to define of osal_init_system;及打开osal.c文件,找到 osalInitTasks();(任务初始化函数)开始执行任务了,
注册任务:
const pTaskEventHandlerFn tasksArr[] = {
macEventLoop,//MAC任务循环
nwk_event_loop,//网络层任务函数
Hal_ProcessEvent,//硬件层函数
#if defined( MT_TASK )
MT_ProcessEvent,//串口支持层定义
#endif
APS_event_loop,//应用支持层任务事件函数
#if defined ( ZIGBEE_FRAGMENTATION )
APSF_ProcessEvent,
#endif
ZDApp_event_loop,//设备对象层函数
#if defined ( ZIGBEE_FREQ_AGILITY ) || defined ( ZIGBEE_PANID_CONFLICT )
ZDNwkMgr_event_loop,
#endif
GenericApp_ProcessEvent//自己定义的任务处理函数
};
初始化任务:
void osalInitTasks( void )//为各个进程添加任务ID,用作查找任务时用
{
uint8 taskID = 0;
tasksEvents = (uint16 *)osal_mem_alloc( sizeof( uint16 ) * tasksCnt);
osal_memset( tasksEvents, 0, (sizeof( uint16 ) * tasksCnt));
macTaskInit( taskID++ );//MAC层的任务ID号
nwk_init( taskID++ );//网络ID分配
Hal_Init( taskID++ );//硬件ID分配
#if defined( MT_TASK )
MT_TaskInit( taskID++ );
#endif
APS_Init( taskID++ );
#if defined ( ZIGBEE_FRAGMENTATION )
APSF_Init( taskID++ );
#endif
ZDApp_Init( taskID++ );
#if defined ( ZIGBEE_FREQ_AGILITY ) || defined ( ZIGBEE_PANID_CONFLICT )
ZDNwkMgr_Init( taskID++ );
#endif
GenericApp_Init( taskID );//为自己的任务添加ID
}
红颜色的字,是我们需要添加的
4.新建coordinator.c(协调器)
端口注册,初始化,任务注册,任务初始化,串口初始化
uartConfig.configured = TRUE; // 2x30 don't care - see uart driver.
uartConfig.baudRate = HAL_UART_BR_115200;
uartConfig.flowControl = FALSE;
uartConfig.flowControlThreshold = 64; // 2x30 don't care - see uart driver.
uartConfig.rx.maxBufSize = 128; // 2x30 don't care - see uart driver.
uartConfig.tx.maxBufSize = 128; // 2x30 don't care - see uart driver.
uartConfig.idleTimeout = 6; // 2x30 don't care - see uart driver.
uartConfig.intEnable = TRUE; // 2x30 don't care - see uart driver.
uartConfig.callBackFunc = rxCB;(串口回执函数)
HalUARTOpen (0, &uartConfig);
static void rxCB(uint8 port,uint8 event)
{
unsigned char Uartbuf[10];
unsigned char len;
len=HalUARTRead(0,Uartbuf,10);
if(len)
{
HalUARTWrite(0,Uartbuf,len);
len=0;
}
}
5.实现串口发送:
通过HalUARTRead读取pc机发送的数据,然后放到Uartbuf中
通过HalUARTRead发送数据给PC机
6.编译下载程序到CC2530中
以上就是串口的过程,后续还会继续更新,谢谢大家
看来TI的2530很流行啊!!
2530其实挺不错的,貌似现在学ZIGBEE的都是在学2530,我也买了一套板子,只不过现在没时间学习了啊,哎
是啊,现在趁还在学校多学点知识,装备自己,最主要的是多学一些解决问题的手段与方法
这东西哪里有卖的啊
你可以看看这个帖子http://bbs.eeworld.com.cn/thread-430376-1-1.html 和他们的淘宝信息,有相应的zigbee套件
很不错,我也用上了
感觉你这个说的不全啊,能说的详细一点吗
不错,挺好!