振荡的判居
时间:10-02
整理:3721RD
点击:
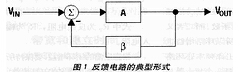
一个反馈系统的典型形式如图1所示,下式给出任何一个反馈系统的特性(一个放大器与源的反馈元件构成一个反馈系统)。
VOUT/VIN=A/(1+Aβ)。
振荡是由不稳定的状态引起的,反馈系统处于不稳定状态是由于传递函数不满足稳定条件所引起的。当(1+Aβ)=0时,公式1等于∞,这表示VIN=0时,存在VOUT°因而设计一个振荡器的关键是确保Aβ=-1(巴克豪森判据),或者使用复数形式的Aβ=1<-180°。-180°相移判据适用于负反馈系统,而0°相移适用于正反馈系统。
当Aβ=-1时,反馈系统的输出电压变为无限大,当输出电压趋近于任何一个电源电压时,放大器中的有源器件改变增益,引起A值的改变,使Aβ≠-1,从而,振荡衰减,并最终停下来。
这里可能出现三种情况之一:第一,由于饱和或截止的非线性,可以使系统趋于稳定;第二,超始的振荡,可能引起系统的饱和(或截止),并且在系统变为线性状态并向远离电源电压方向变化之前,可使这种状态保持很长一段时;第三,系统保持线性状态并向远离电源电压方向变化。两者交替产生高度失真的振荡(通常为准方波),而形成的振荡器被称为张弛振荡器。三者交替产生正弦波振荡器。
所有振荡器都是由TLV247X运算放大器、5%精度的电阻和20%精度的电容构成的,从而元件的容差引起理想值与测量值之间差别。
来源:(互联网)