第七篇?Rico board实现4路“DA”输出
时间:10-02
整理:3721RD
点击:
因为我要通过4路DA输出,控制两路电机,而Rico Board上又没有直接输出DA的部分,所以我考虑为了节省资金,准备通过4路PWM输出来实现4路DA的输出功能。
第一步:
先把4路DA正常输出吧,用的hrt高精度时钟,主要为了实现比较平滑的输出,pwm的频率越高,低通滤波后的输出越平滑,这也是我所希望的。
硬件上,用了4个GPIO实现4路输出,如下所示:
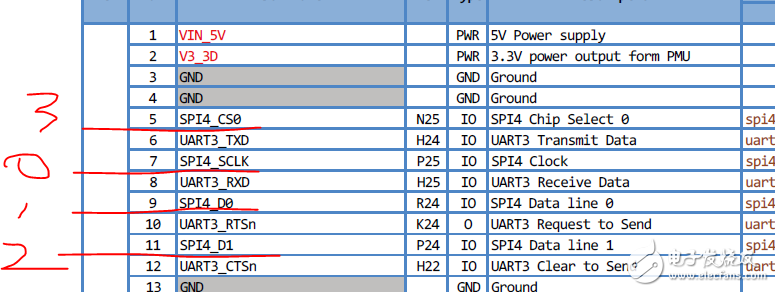
实现的效果如下:

我同时测试了两路输出,因为示波器只有两个通道啊。
测了三组:

测试的硬件连接图:


示波器的显示如下所示:



今天焊上了滤波电路,也测了三组,终端显示如下:
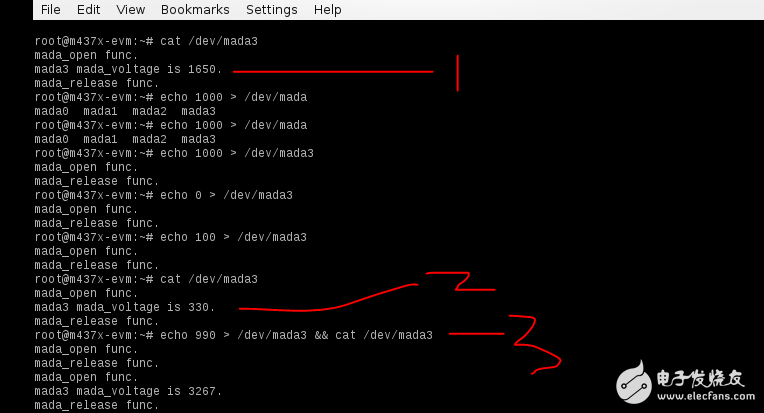
分别表示1650mv,330mv,3267mv。
滤波后的输出波形,示波器测试如下:



但是把信号加入到电机驱动时,发现电压被拉低或是被太高,准备明天再加一级跟随试一试。
下图是我的滤波电路和测试现场图:




驱动代码如下:
- /*************************
- *
- *[url=home.php?mod=space&uid=1455510]@file[/url] mada.c
- *@date 2016.11.12
- *author iysheng
- *
- *************************/
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- MODULE_LICENSE("GPL");
- MODULE_AUTHOR("iysheng ");
- MODULE_VERSION("0.1");
- #define MADA_NUM 4
- #define MADA_NAME "MADA"
- #define NAME_SIZE 10
- #define MADA_TIME_SCALE 1000
- #define VALUE_SIZE 8
- #define MADA_MAJOR 0
- static dev_t mada_devnum;
- static int mada_major = MADA_MAJOR;
- #define P_VOLTAGE 33
- #define MADA_VOLTAGE(devp) (P_VOLTAGE*(devp->mada_high)/10)
- int mada_gpio[MADA_NUM] = {164, 165, 166, 167};
- struct mada_dev{
- struct cdev cdev;
- struct device *device;
- int mada_gpio;
- unsigned int mada_high;
- unsigned int mada_voltage;
- dev_t devnum;
- char mada_name[NAME_SIZE];
- struct hrtimer mada_hrt;
- bool mada_gpio_value;
- bool mada_hrt_state;
- } *mada_devp;
- struct class *mada_class;
- /*
- int MADA_VOLTAGE(struct mada_dev * devp)
- {
- int voltage;
- voltage = P_VOLTAGE * devp->mada_high;
- return voltage;
- }
- */
- enum hrtimer_restart mada_hrt_callback(struct hrtimer *hrt)
- {
- struct mada_dev *devp;
- devp = container_of(hrt, struct mada_dev, mada_hrt);
- devp->mada_gpio_value = !devp->mada_gpio_value;
- gpio_set_value(devp->mada_gpio, devp->mada_gpio_value);
- if(devp->mada_gpio_value == true)
- hrtimer_forward_now(hrt, ns_to_ktime(devp->mada_high * MADA_TIME_SCALE));
- else
- hrtimer_forward_now(hrt, ns_to_ktime((1000 - devp->mada_high) * MADA_TIME_SCALE));
- return HRTIMER_RESTART;
- }
- int mada_open (struct inode *inode, struct file *filp)
- {
- struct mada_dev *devp = container_of(inode->i_cdev, struct mada_dev, cdev);
- filp->private_data = devp;
- if(devp->mada_hrt_state == false)
- {
- hrtimer_init(&devp->mada_hrt, CLOCK_MONOTONIC, HRTIMER_MODE_REL);
- devp->mada_hrt.function = mada_hrt_callback;
- hrtimer_start(&devp->mada_hrt,ns_to_ktime(devp->mada_high),HRTIMER_MODE_REL);
- devp->mada_hrt_state = true;
- }
- printk(KERN_INFO "mada_open func.\n");
- return 0;
- }
- int mada_release (struct inode *inode, struct file *filp)
- {
- printk(KERN_INFO "mada_release func.\n");
- return 0;
- }
- ssize_t mada_write (struct file *filp, const char __user *buf, size_t count, loff_t *ppos)
- {
- int ret;
- char value[VALUE_SIZE];
- struct mada_dev *devp = filp->private_data;
- ret = copy_from_user(value, buf, sizeof(buf));
- if(0 != ret)
- {
- printk(KERN_INFO "error in writing and errnum is %d.\n", ret);
- return 0;
- }
- else
- devp->mada_high = (unsigned int)simple_strtoul(value, NULL, 10);
- return sizeof(buf);
- }
- ssize_t mada_read (struct file *filp, char __user *buf, size_t count, loff_t *ppos)
- {
- int ret;
- struct mada_dev *devp = filp->private_data;
- char value[VALUE_SIZE];
- devp->mada_voltage = MADA_VOLTAGE(devp);
- sprintf(value, "%d", devp->mada_voltage);
- ret = copy_to_user(buf,value,sizeof(value));
- if(0 != ret)
- {
- printk(KERN_INFO "error in reading and errnum is %d.\n", ret);
- }
- else
- printk(KERN_INFO "%s mada_voltage is %s.\n",devp->mada_name,value);
- return ret;
- }
- struct file_operations mada_fops = {
- .open = mada_open,
- .release = mada_release,
- .read = mada_read,
- .write = mada_write,
- };
- int mada_setup(struct mada_dev *devp, int min, int gpio_num)
- {
- int ret = 0;
- printk(KERN_INFO "mada_setup function.\n");
- if(!gpio_is_valid(gpio_num))
- {
- printk(KERN_INFO "invalid gpio_num:%d.\n", gpio_num);
- return -1;
- }
- else
- {
- gpio_request(gpio_num,"sysfs");
- gpio_direction_output(gpio_num,false);
- gpio_export(gpio_num,false);
- }
- devp->mada_gpio = gpio_num;
- devp->mada_high = 500;
- //devp->mada_voltage = MADA_VOLTAGE(devp);
- devp->mada_hrt_state = false;
- devp->mada_gpio_value = false;
- devp->devnum = MKDEV(mada_major, min);
- sprintf(devp->mada_name, "mada%d", min);
- cdev_init(&devp->cdev,&mada_fops);
- ret = cdev_add(&devp->cdev,MKDEV(mada_major, min),1);
- if(ret)
- {
- printk(KERN_INFO "add mada%d fail. error is %d", min, ret);
- memset(devp, 0, sizeof(struct mada_dev));
- gpio_free(gpio_num);
- gpio_unexport(gpio_num);
- return ret;
- }
- else
- devp->device = device_create(mada_class,NULL,MKDEV(mada_major, min),NULL,devp->mada_name);
-
- return 0;
- }
- void mada_del(struct mada_dev *devp)
- {
- hrtimer_cancel(&devp->mada_hrt);
- gpio_unexport(devp->mada_gpio);
- gpio_free(devp->mada_gpio);
- device_destroy(mada_class,devp->devnum);
- unregister_chrdev_region(devp->devnum, 1);
- memset(devp, 0, sizeof(struct mada_dev));
- kfree(devp);
- }
- int __init mada_init(void)
- {
- int ret = 0, i;
- printk(KERN_INFO "mada_init begin.\n");
- mada_devp = kzalloc(MADA_NUM * sizeof(struct mada_dev), GFP_KERNEL);
- if(IS_ERR(mada_devp))
- {
- ret = PTR_ERR(mada_devp);
- printk(KERN_INFO "vmalloc_fail and err is %d.\n", ret);
- goto fail;
- }
- if(mada_major == 0)
- {
- ret = alloc_chrdev_region(&mada_devnum,0,MADA_NUM,MADA_NAME);
- mada_major = MAJOR(mada_devnum);
- }
- else
- {
- mada_devnum = MKDEV(mada_major, 0);
- ret = register_chrdev_region(mada_devnum,MADA_NUM,MADA_NAME);
- }
- if(ret < 0)
- {
- printk(KERN_INFO "register_fail and err is %d.\n", ret);
- goto fail;
- }
-
- mada_class = class_create(THIS_MODULE, MADA_NAME);
- for(i=0; i<MADA_NUM; i++)
- {
- mada_setup(mada_devp+i, i, mada_gpio[i]);
- }
-
- printk(KERN_INFO "mada_init!\n");
- return 0;
- fail:
- return ret;
- }
- void __exit mada_exit(void)
- {
- int i;
- for(i=0; i<MADA_NUM; i++)
- mada_del(mada_devp+i);
- class_destroy(mada_class);
- printk("mada_exit!\n");
- }
- module_init(mada_init);
- module_exit(mada_exit);
主要部分是4路高精度时钟。