新能源电动汽车整车控制器
新能源电动汽车整车控制器VCU
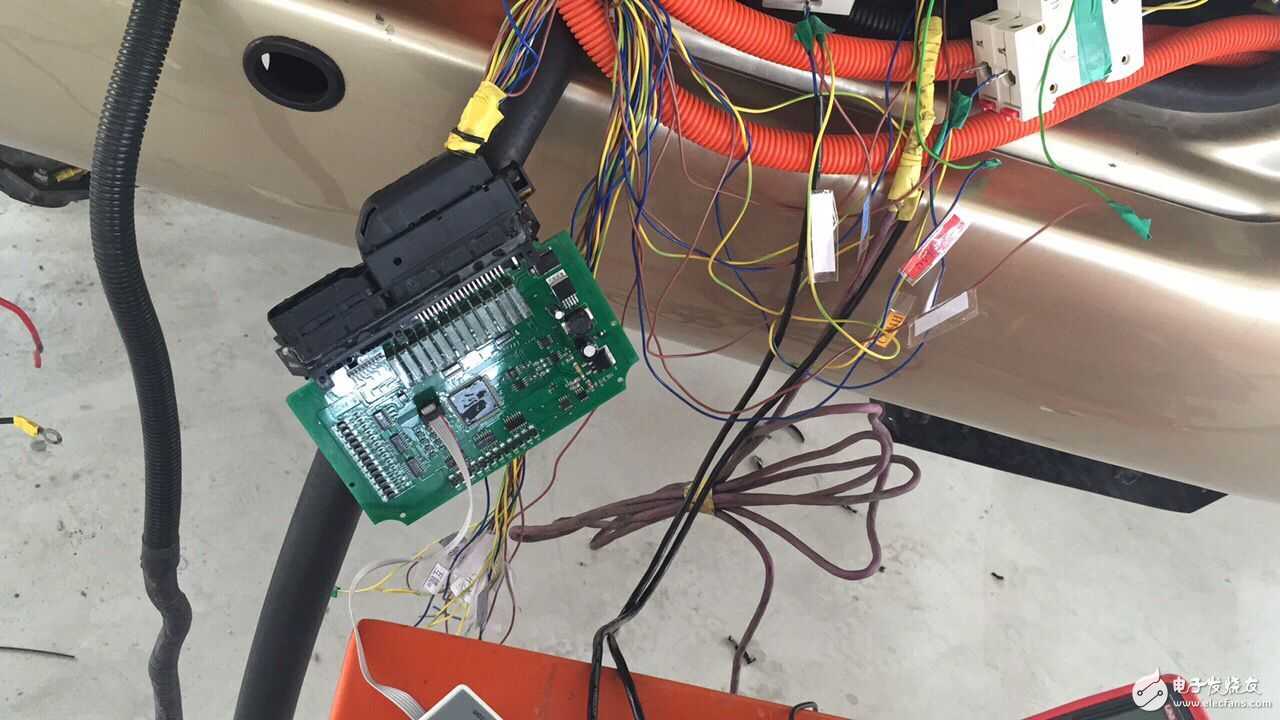
一、首先硬件平台:
基于飞思卡尔MC9S12系列双核CPU的处理器,CAN通讯使用协处理器进行收发,整车控制策略在主CPU进行,这样主处理器只是关心控制策略及算法的实现,提升了控制的失效性。硬件平台有底边开关采集、高边开关采集,采集电路全部隔离,实现的抗干扰的采集措施。具有低边驱动输出、高边驱动输出,最大驱动能力可达5A,具有诊断开路和短路的能力。硬件平台有一路150mA的5V输出,可以供油门或刹车踏板供电;双路CAN通讯接口,方便实现整车的动力管理和能量管理。同时CAN通讯采用了隔离收发器,能够最大限度的提升CAN的可靠稳定性。同时还具有1路485通讯接口,7路模拟量采集。
二、功能确定:
根据两种车型综合确定所需功能(第二款车型资料不全,不上图)。
样车一:7米考斯特,根据7米考斯特整车电气原理图及通讯协议的定义,以及整车所需的控制功能制定了如下接口定义和控制功能:
样车控制原理图:
(1)样车整车控制接口定义:
(2)功能需求:
CANA网络:动力总线,主要处理电机的通讯包括油门力矩管理,刹车回馈制动力矩管理,动力故障管理等;CANB网络:主要是电池及辅机的控制,主要管理电池的状态,电机故障信息管理,辅机动态管理,整车能力优化处理等。开关量:主要是采集档位信号、刹车开关信号、手刹信号、门开信号、空调信号、高压上电信号、充电信号等;驱动信号主要是控制输出Ready使能信号、关空调信号;模拟量采集:油门和刹车模拟量的采集。
目标实现:0-50KM/H加速时间小于18s;最高速度85KM/H;最大爬坡度>20%;百公里耗电Ekg小于0.24,符合国家要求。
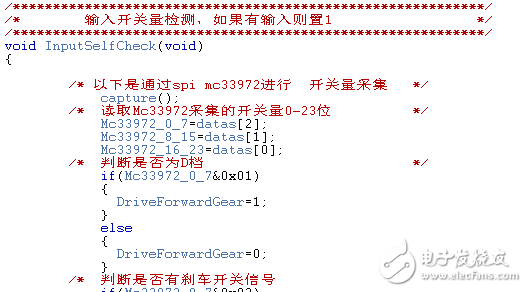
三、软件支持:
编译软件CodeWarrior 5.1;CAN通讯分析软件:CANTest,CAN卡:周立功CAN-II;
CAN通讯仿真软件:CANoe;CAN通讯数据库编辑器:CANdb+;CAN图形仿真界面:BUSmaster;使用KvaserLeaf lihgt 。上位机:VB编写;
四、软件架构:
…………………………………………………………
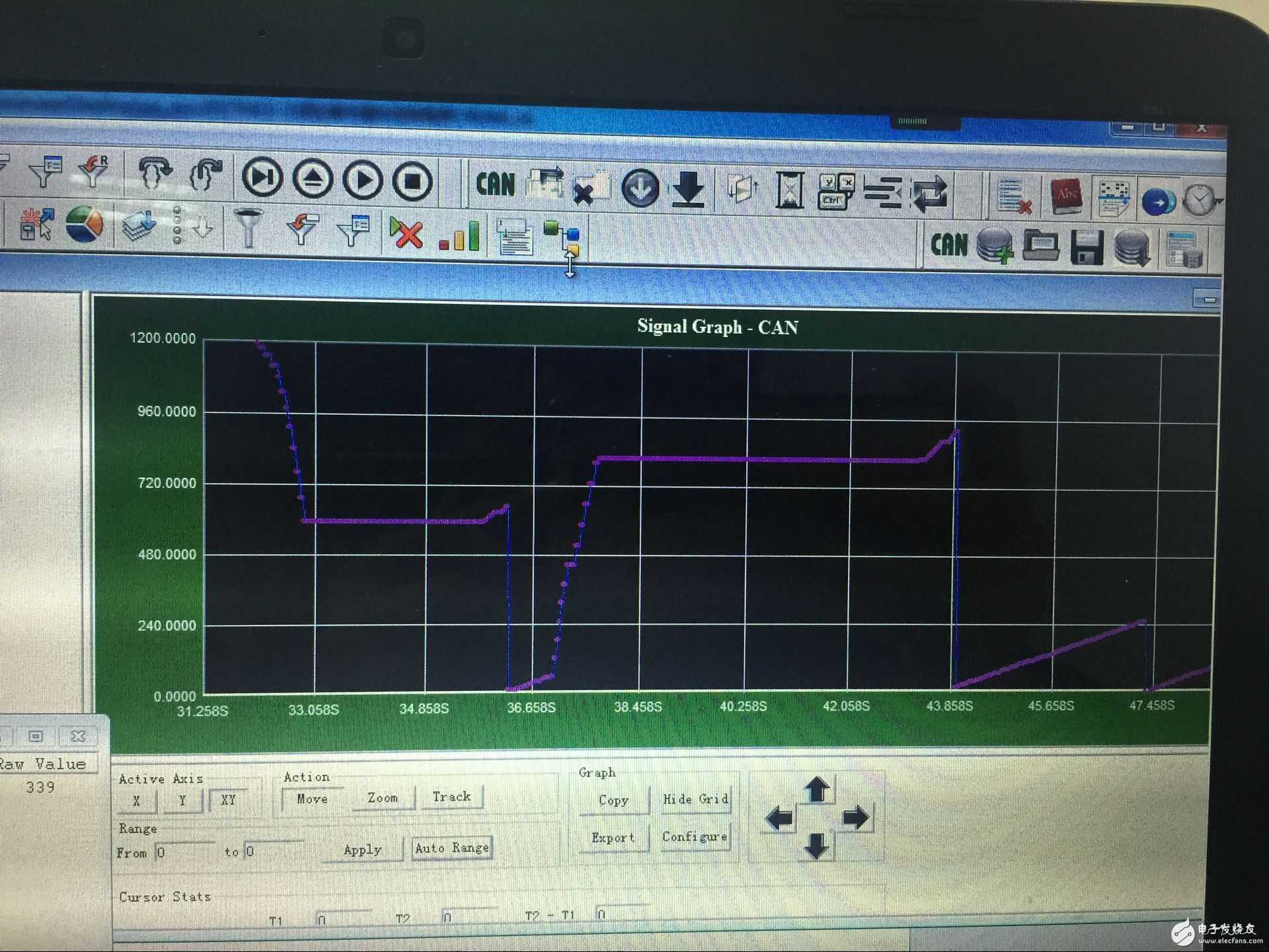
五、实验图片
(注意:这个图片是油门量,这个是刚开始调试的图片,是有问题的,你猜问题出在哪,怎么解决的呢,互动下吧)
六:总结
充实的一个月,把实验产品初步的做成了一款产品,当然还有很多功能需要完善;计划在后续的3个月内,能完善好。
月底了,也五一了,大家都在休息,我还在车间调试整车控制器和整车通讯控制,我想着,五一可是劳动节啊,还是劳动快乐啊……!
15020813759







加油!
你的整车控制策略是直接写的函数,牛逼,我们一般会用simulink,然后在往里面刷
厉害
谢谢分享,学习学习。
不错,好像后面还有很多工作要做。加油!