i2c驱动(一)编写及烧录
时间:10-02
整理:3721RD
点击:
瑞芯微的板子是支持设备树的,一般来说我比较喜欢用i2c_register_board_info这类的函数来注册设备,不过还是听人家厂商的建议吧,修改一下dts就好,瑞芯微平台的设备树位置在kernel/arch/arm64/boot/dts/rockchip/rk3399-firefly-mini-edp.dts这里我们只修改一下i2c的设备节点就好。简单修改一下,基本我们就为我们的设备添加一下设备的总线和设备地址就好
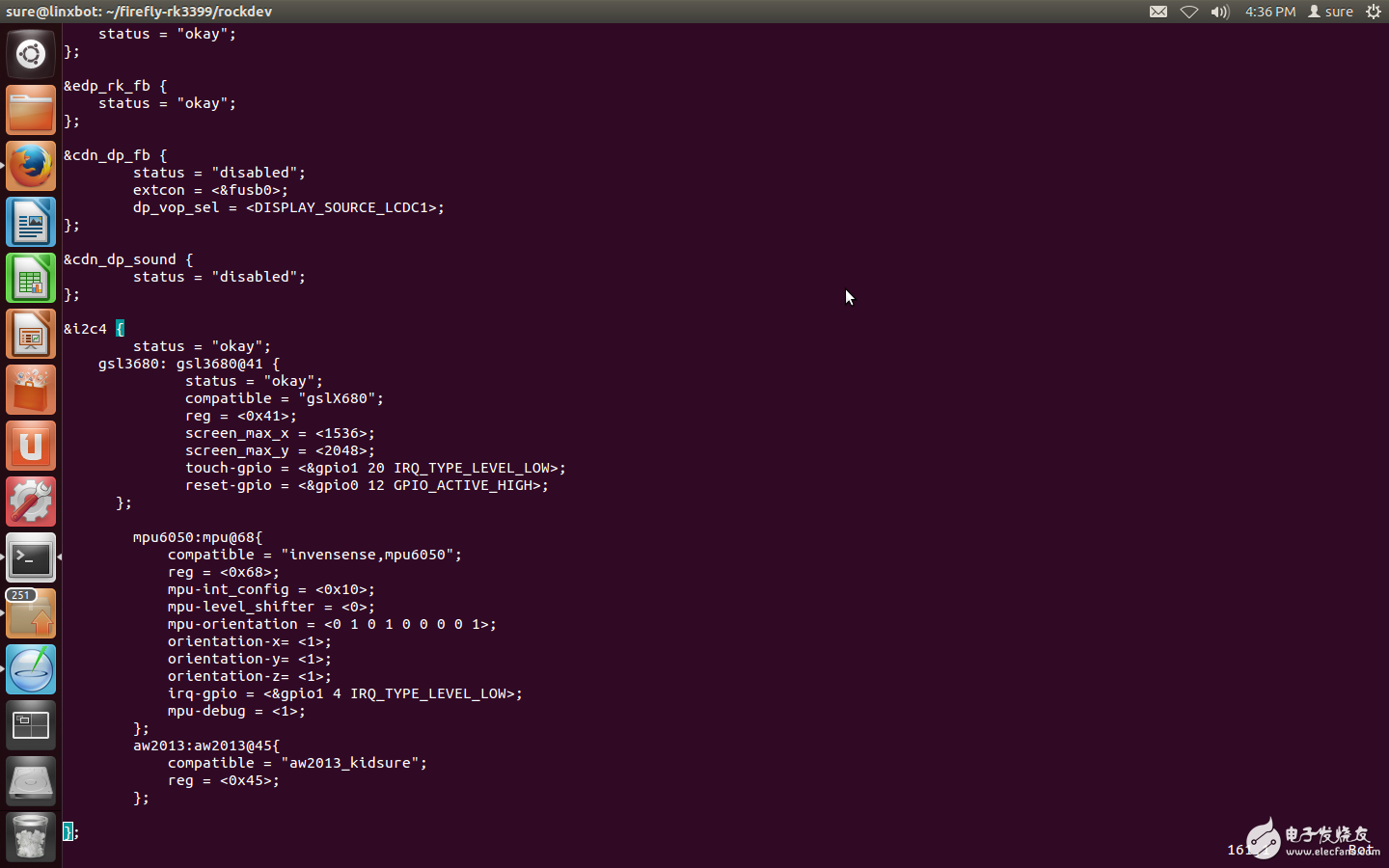
这样在设备启动uboot的时候会提前判断是否有该设备在这条总线上,确定是否加载。
然后确定有设备之后会在驱动链表里查询是否有对应的驱动程序。具体的详细内容,可以看一下linux内核情景分析。
说实话写这些东西的时候比较麻烦,我的思路也不太清晰,包括rk3399的wiki里面对于i2c驱动的帮助很是模糊,哈哈 ,还是提议大家去看源代码比较方便。我们按照wiki的思路来吧,毕竟我从头讲起来比较麻烦。附rk3399的wiki地址http://wiki.t-firefly.com/index.php/Firefly-RK3399/I2C。
1.首先我们要写一个of_device_id的结构体,用于调用在dts设备树中注册的设备。
- static struct of_device_id aw2013_ts_idss[] = {
- {.compatible = "aw2013_kidsure"},
- {}
- };
- static const struct i2c_device_id aw2013_ts_ids[] = {
- {AW_NAME , 0},
- {}
- };
- MODULE_DEVICE_TABLE(i2c, aw2013_ts_ids);
- static struct i2c_driver aw_i2c_driver = {
- .probe = aw_i2c_probe,
- //.remov = aw_i2c_remove,
- .driver = {
- .name = AW_NAME,
- .owner = THIS_MODULE,
- .of_match_table = of_match_ptr(aw2013_ts_idss),
- },
- .id_table = aw_i2c_id,
- };
- static int __init aw2013_i2C_init(void)
- {
- //int ret = i2c_register_board_info(1, &i2c_devs_aw2013, 1);
- //pr_emerg("init is running!%d\n", ret);
- int ret = i2c_add_driver(&aw_i2c_driver);
- pr_emerg("aw2013 dirver is regist %d", ret);
- proc_create("driver/aw2013_mtk", 0, NULL, &aw2013_fops);
- return 0;
- }
- static void __exit aw2013_i2C_exit(void){
- }
- module_init(aw2013_i2C_init);
- module_exit(aw2013_i2C_exit);
- MODULE_LICENSE("GPL");
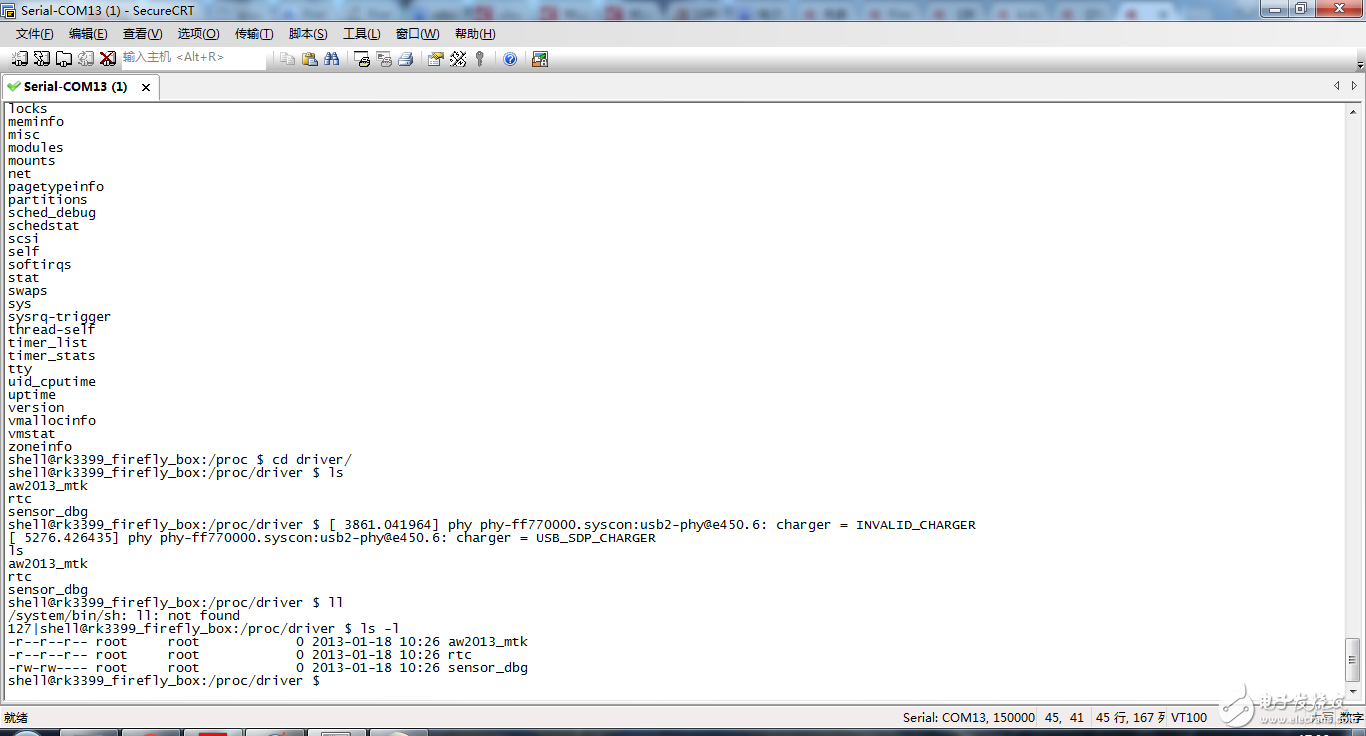
编译成功后会在/proc/driver/目录下生成咱们的测试点,并且chmod 777 给他足够的读写权限。然后定义一下aw_2013_fop,当读写该节点的时候可以直接调用这些fop函数。这个方法可以让用户通过用户空间直接操作到内核空间的设备,百试不爽的调试方法。
- static ssize_t aw_test_read(struct file *file, char __user *data, size_t len, loff_t *ppos)
- {
- return 0;
- }
- //static int aw_test_write(struct file *file, const char *buffer, size_t count,
- // loff_t *data)
- static ssize_t aw_test_write (struct file *file, const char *buffer, size_t count ,
- loff_t *data){
- int ret , status,id;
- char buf[2];
- // char tmp = 0;
- char r_data,g_data,b_data;
- ret = sscanf(buffer, "%x", &status);
- rgb_state = status;
- pr_emerg("_____sure___%s, %x", buffer,rgb_state);
- r_data = rgb_state>>16&0xff;
- g_data = rgb_state>>8&0xff;
- b_data = rgb_state&0xff;
- buf[0]=0x31;
- buf[1]=0x62;
- breathlight_master_send(0x45,buf,2);
- buf[0]=0x32;
- buf[1]=0x62;
- breathlight_master_send(0x45,buf,2);
- buf[0]=0x33;
- buf[1]=0x62;
- breathlight_master_send(0x45,buf,2);
- buf[0]=0x34;
- buf[1]=b_data;
- breathlight_master_send(0x45,buf,2);
- buf[0]=0x35;
- buf[1]=g_data;
- breathlight_master_send(0x45,buf,2);
- buf[0]=0x36;
- buf[1]=r_data;
- breathlight_master_send(0x45,buf,2);
- for(id = 0; id < 3 ; id ++){
- buf[0]=0x37+id*3;
- buf[1]=0x22;
- breathlight_master_send(0x45,buf,2);
- buf[0]=0x38+id*3;
- buf[1]=0x22;
- breathlight_master_send(0x45,buf,2);
- buf[0]=0x39+id*3;
- buf[1]=0x00;
- breathlight_master_send(0x45,buf,2);
- }
- buf[0]=0x30;
- buf[1]=0x07;
- breathlight_master_send(0x45,buf,2);
-
- return 0;
- }
- static struct file_operations aw2013_fops = {
- .read = aw_test_read,
- .write = aw_test_write,
- };
写完了这些之后将c文件放到源码目录的kernel/driver/misc下面(其实哪个目录都无所谓了,哈哈),然后改一下对应目录的Makefile,在其中加一条obj-y = xxxxxxx.o 这个o文件的名字和你的c文件相同就好了。然后重新编译内核并且同步到update.img里面。烧写到板子上面,我这里详细的驱动实现还没有仔细调通,不过测试点基本可用了。下一篇开始我会调通rgb读写测试点操作,其实这是个小测试,还在考虑要不要编写HAL。
下一篇帖预告一下,会继续该框架实现内部实现内容,驱动已经编在内核里面写进去了。刚刚也给大家截图crt中已经有了测试点了。因为我做的比较偏底层对图形界面和上层要求不高就使用简单的插件来实现显示了哈哈(省着搭建vnc了,装完逼就跑贼爽)
顺手给喜欢玩安卓的童鞋们安利个插件,挺好用的。哈哈
自顶一哈 哈哈哈哈哈哈
技术贴,支持一下
这个开发板不是支持VR和三路摄像头编码支持吗 测试一下吧
好帖子!Firefly RK3399支持多路视频编解码啊,上周发布的技术案例
谢谢关注哈,现在在调mtk的手机项目,等有时间了会做一下这块的东西的
这个板子试用有时间限制的
摄像头驱动这类的我会做的,视频多路编码的这个我着实没时间搞,另外我试用申请里面没有写这部分的东西哦,你可以关注IC爬虫的使用哦,他是做这方面的专家吧。同样谢谢小编啦